تهذيب الحشائش السنتيمترية بدون GPS RTK

يعد نظام تحديد المواقع العالمي (GPS) رائعًا للتنقل عبر الطرق ، حيث لا يتطلب الكثير من الدقة. لكن نظام تحديد المواقع العالمي (GPS) دقيق فقط لعدة أمتار ، مما يعني أنه غير مناسب للتطبيقات التي تتطلب تحديد المواقع بدقة أكبر. يمكن أن تحقق أنظمة GPS (الحركية في الوقت الحقيقي) RTK دقة أكبر بكثير ، لكنها معقدة وتتطلب الاشتراك في خدمة تصحيح. احتاج فيكتور كوروسا إلى تحديد موقع دقيق لجزازة العشب الآلي ، لكنه لم يرغب في الاعتماد على RTK GPS. بدلاً من ذلك ، استخدم عددًا قليلاً من لوحات Arduino لتمكين نطاق UWB لتحديد المواقع بمقياس السنتيمتر.
UWB (النطاق العريض للغاية) هي تقنية راديو فتحتها لجنة الاتصالات الفيدرالية (FCC) للتطبيقات الاستهلاكية والتجارية في عام 2002. وهي مثالية لنقل كميات كبيرة من البيانات في نطاق قصير. من الممكن أيضًا استخدام UWB لحساب المسافات عن طريق قياس ToF (وقت الرحلة) بين جهاز "علامة" وجهاز "مرساة". باستخدام جهازي تثبيت ، يمكن تحديد موضع الملصق على مستوى ثنائي الأبعاد. باستخدام ثلاث نقاط إرساء ، يمكن تحديد الموقع الدقيق للمنارة في مساحة ثلاثية الأبعاد.

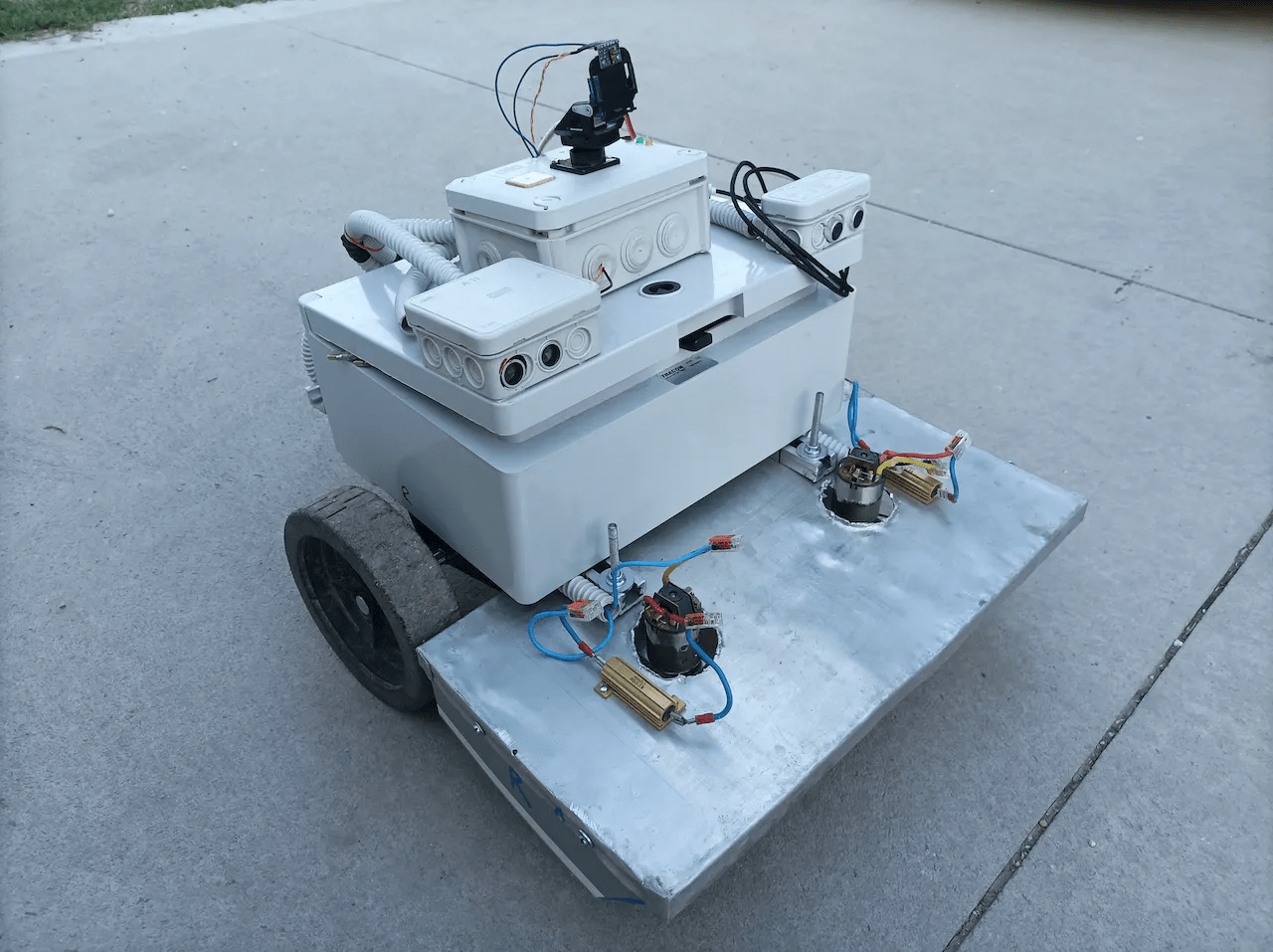
استخدم Kurusa هذه القدرة على تحديد المواقع UWB للتنقل في جزازة العشب الآلية. تدمج جزازة العشب عدة لوحات: Arduino Due ، واثنتان من Nanos وأربعة SparkFun Arduino Pro Minis. تتصل اللوحات الأربعة الأخيرة بوحدات الإرسال والاستقبال Decawave DMW1000 UWB - ثلاثة منها للمراسي البعيدة وواحدة للعلامة الموجودة على اللوحة. تعمل لوحة Due باعتبارها وحدة التحكم الرئيسية على متن الطائرة وتدير FreeRTOS ، وتراقب مقياس التسارع MPU6050 ، وتدفع محركات الروبوت عبر جسر H. واجهات لوحة نانو واحدة مع مستشعرات فوق صوتية لتجنب العوائق ، بينما تراقب Nano الثانية مستشعر LIDAR ، والذي يتحقق النظام مما إذا كانت أجهزة الاستشعار بالموجات فوق الصوتية تكتشف عائقًا.

مع عمل كل هذه الأجهزة في حفلة موسيقية ، تمتلك Kurusa جزازة أعشاب آلية مزودة بمجموعة متطورة من أجهزة الاستشعار. إنه يعرف بالضبط مكان وجوده في الفناء ، مما يسمح له باتباع المسارات بدقة أثناء القص. إذا دخل شيء غير متوقع في مسار الجزازة ، مثل كرة قدم طفل ، فسوف تكتشفه الجزازة وتحاول توجيهها حولها.
يعد نظام تحديد المواقع العالمي (GPS) رائعًا للتنقل عبر الطرق ، حيث لا يتطلب الكثير من الدقة. لكن نظام تحديد المواقع العالمي (GPS) دقيق فقط لعدة أمتار ، مما يعني أنه غير مناسب للتطبيقات التي تتطلب تحديد المواقع بدقة أكبر. يمكن أن تحقق أنظمة GPS (الحركية في الوقت الحقيقي) RTK دقة أكبر بكثير ، لكنها معقدة وتتطلب الاشتراك في خدمة تصحيح. احتاج فيكتور كوروسا إلى تحديد موقع دقيق لجزازة العشب الآلي ، لكنه لم يرغب في الاعتماد على RTK GPS. بدلاً من ذلك ، استخدم عددًا قليلاً من لوحات Arduino لتمكين نطاق UWB لتحديد المواقع بمقياس السنتيمتر.
UWB (النطاق العريض للغاية) هي تقنية راديو فتحتها لجنة الاتصالات الفيدرالية (FCC) للتطبيقات الاستهلاكية والتجارية في عام 2002. وهي مثالية لنقل كميات كبيرة من البيانات في نطاق قصير. من الممكن أيضًا استخدام UWB لحساب المسافات عن طريق قياس ToF (وقت الرحلة) بين جهاز "علامة" وجهاز "مرساة". باستخدام جهازي تثبيت ، يمكن تحديد موضع الملصق على مستوى ثنائي الأبعاد. باستخدام ثلاث نقاط إرساء ، يمكن تحديد الموقع الدقيق للمنارة في مساحة ثلاثية الأبعاد.
استخدم Kurusa هذه القدرة على تحديد المواقع UWB للتنقل في جزازة العشب الآلية. تدمج جزازة العشب عدة لوحات: Arduino Due ، واثنتان من Nanos وأربعة SparkFun Arduino Pro Minis. تتصل اللوحات الأربعة الأخيرة بوحدات الإرسال والاستقبال Decawave DMW1000 UWB - ثلاثة منها للمراسي البعيدة وواحدة للعلامة الموجودة على اللوحة. تعمل لوحة Due باعتبارها وحدة التحكم الرئيسية على متن الطائرة وتدير FreeRTOS ، وتراقب مقياس التسارع MPU6050 ، وتدفع محركات الروبوت عبر جسر H. واجهات لوحة نانو واحدة مع مستشعرات فوق صوتية لتجنب العوائق ، بينما تراقب Nano الثانية مستشعر LIDAR ، والذي يتحقق النظام مما إذا كانت أجهزة الاستشعار بالموجات فوق الصوتية تكتشف عائقًا.
مع عمل كل هذه الأجهزة في حفلة موسيقية ، تمتلك Kurusa جزازة أعشاب آلية مزودة بمجموعة متطورة من أجهزة الاستشعار. إنه يعرف بالضبط مكان وجوده في الفناء ، مما يسمح له باتباع المسارات بدقة أثناء القص. إذا دخل شيء غير متوقع في مسار الجزازة ، مثل كرة قدم طفل ، فسوف تكتشفه الجزازة وتحاول توجيهها حولها.
What's Your Reaction?



















