كشف وتعقب حالات سقوط العامل مع ML المدمج
كشف وتعقب حالات سقوط العامل مع ML المدمج
فريق Arduino - 7 سبتمبر 2022

تعتمد بعض الصناعات على قدرة العمال على الوصول إلى مساحات عالية من خلال استخدام السلالم أو منصات الوقوف المتنقلة. ونظرًا لخطرها المحتمل في حالة السقوط ، كان لدى روني بانديني فكرة إنشاء نظام متكامل قادر على اكتشاف السقوط والإبلاغ عنه تلقائيًا في مجموعة متنوعة من السيناريوهات.
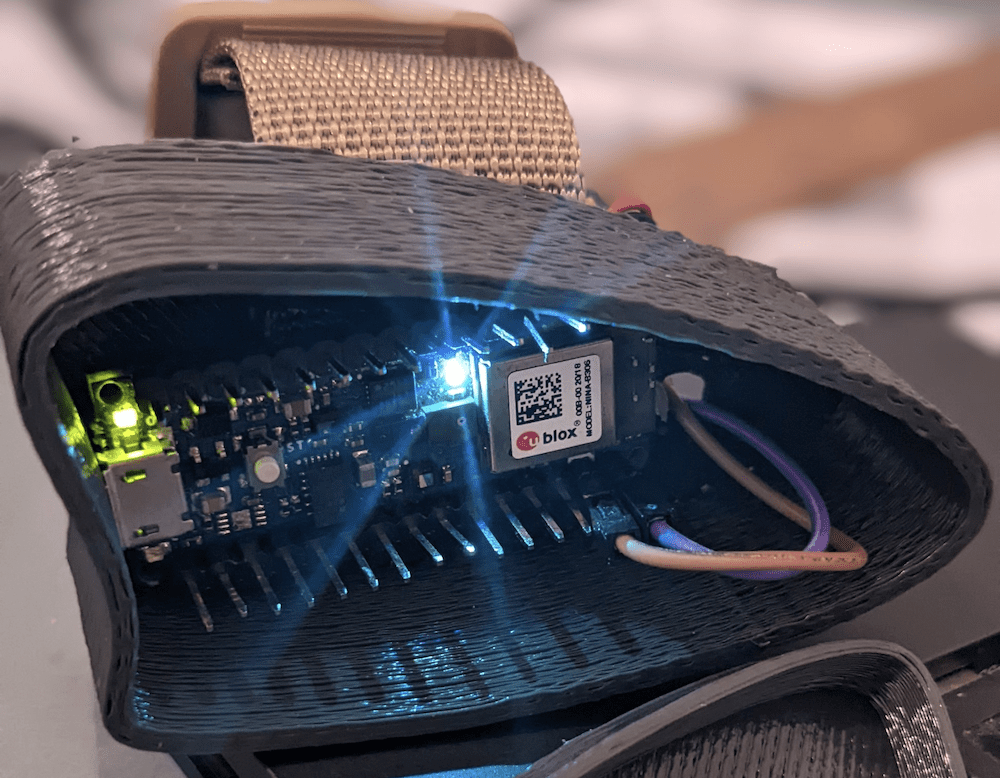
يمكن اكتشاف السقوط عن طريق قياس التغيرات في التسارع ؛ لذلك ، اختار Bandini لوحة Arduino Nano 33 BLE Sense بسبب مقياس التسارع المدمج ثلاثي المحاور. كما أنه يدعم استهلاكًا منخفضًا للطاقة ، مما يعني أنه يمكن إضافة بطارية LiPo ووحدة الشحن المصاحبة TP4056 للتشغيل اللاسلكي تمامًا. تم جمع بيانات التسريع عن طريق أخذ عينات متعددة في Edge Impulse Studio ووضع علامات عليها إما "سقوط" أو "تعليق" عند عدم وجود حركة. بمجرد الاختبار ، تم دمج النموذج الناتج في رسم Arduino ، والذي يصدر حزمة إعلانات Bluetooth® كلما تم اكتشاف انخفاض.

تقع مسؤولية جمع كل من هذه الحزم على خادم Raspberry Pi المركزي. فهو يقوم بتشغيل نص برمجي Python يتحقق باستمرار من بيانات إعلان BLE الجديدة ويدرج سجلًا جديدًا في بيانات ملفه الأساسي وفقًا لذلك. يمكن بعد ذلك الاستعلام عن كل هذه البيانات في نص برمجي منفصل واستخدامها لإنشاء رسم بياني يوضح عدد المرات التي سقط فيها كل عامل.
يمكن العثور على مزيد من التفاصيل في وصف مشروع Bandini ومدونة Edge Impulse هنا.
فريق Arduino - 7 سبتمبر 2022
تعتمد بعض الصناعات على قدرة العمال على الوصول إلى مساحات عالية من خلال استخدام السلالم أو منصات الوقوف المتنقلة. ونظرًا لخطرها المحتمل في حالة السقوط ، كان لدى روني بانديني فكرة إنشاء نظام متكامل قادر على اكتشاف السقوط والإبلاغ عنه تلقائيًا في مجموعة متنوعة من السيناريوهات.
يمكن اكتشاف السقوط عن طريق قياس التغيرات في التسارع ؛ لذلك ، اختار Bandini لوحة Arduino Nano 33 BLE Sense بسبب مقياس التسارع المدمج ثلاثي المحاور. كما أنه يدعم استهلاكًا منخفضًا للطاقة ، مما يعني أنه يمكن إضافة بطارية LiPo ووحدة الشحن المصاحبة TP4056 للتشغيل اللاسلكي تمامًا. تم جمع بيانات التسريع عن طريق أخذ عينات متعددة في Edge Impulse Studio ووضع علامات عليها إما "سقوط" أو "تعليق" عند عدم وجود حركة. بمجرد الاختبار ، تم دمج النموذج الناتج في رسم Arduino ، والذي يصدر حزمة إعلانات Bluetooth® كلما تم اكتشاف انخفاض.
تقع مسؤولية جمع كل من هذه الحزم على خادم Raspberry Pi المركزي. فهو يقوم بتشغيل نص برمجي Python يتحقق باستمرار من بيانات إعلان BLE الجديدة ويدرج سجلًا جديدًا في بيانات ملفه الأساسي وفقًا لذلك. يمكن بعد ذلك الاستعلام عن كل هذه البيانات في نص برمجي منفصل واستخدامها لإنشاء رسم بياني يوضح عدد المرات التي سقط فيها كل عامل.
يمكن العثور على مزيد من التفاصيل في وصف مشروع Bandini ومدونة Edge Impulse هنا.
What's Your Reaction?





















