Real Robot One عبارة عن ذراع آلية عالية الأداء يمكنك بناءها بنفسك
Real Robot One عبارة عن ذراع آلية عالية الأداء يمكنك بناءها بنفسك
فريق Arduino - 15 أغسطس 2022

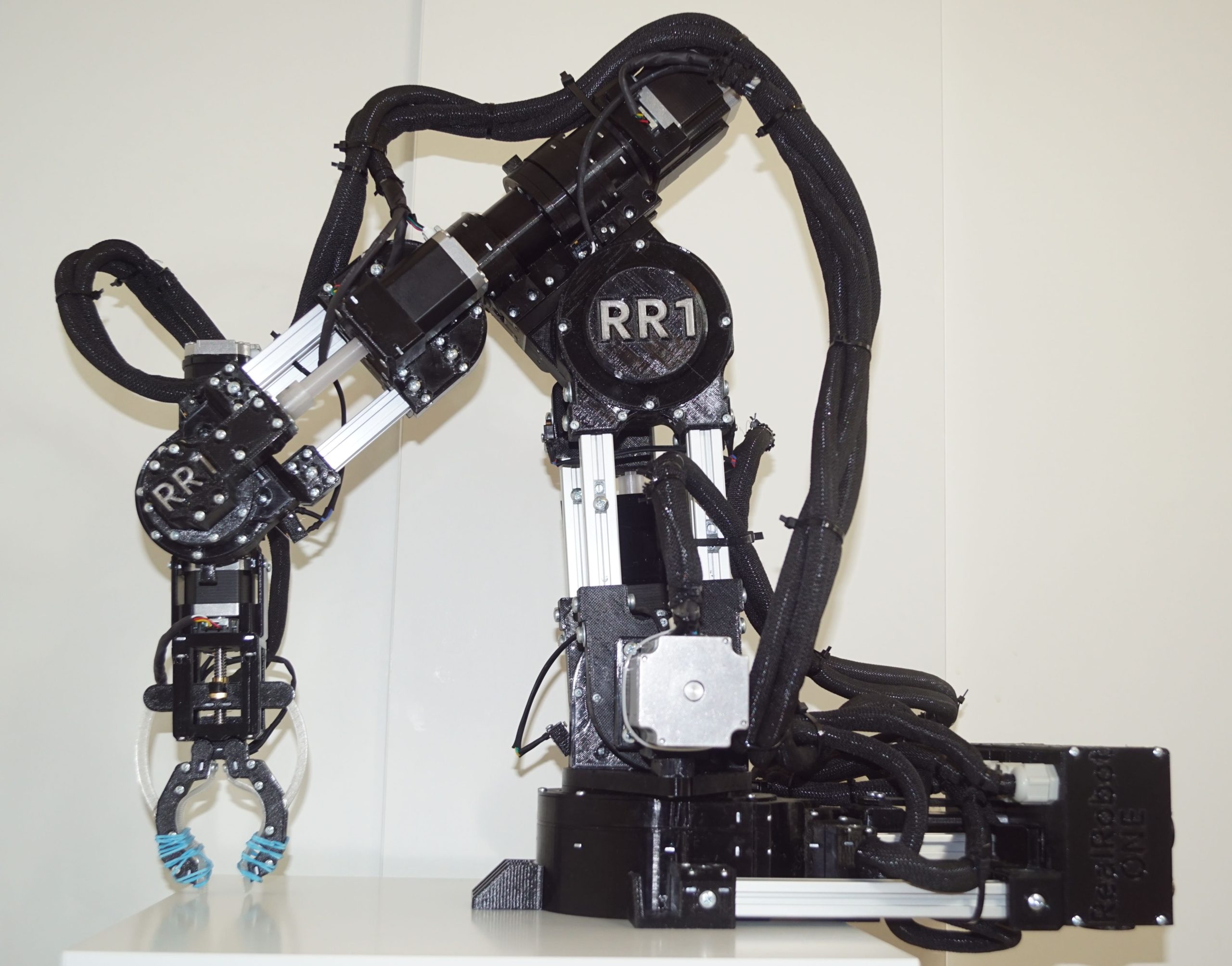
تعتبر الأذرع الروبوتية آلات متعددة الاستخدامات وهي رائعة لتعلم مبادئ الروبوتات أو حتى القيام ببعض الأعمال المفيدة للهواة. يمكن أن يتكون هذا العمل من اختيار المكونات ووضعها على لوحات الدوائر أو صناديق التغليف أو أي عنصر آخر يمكن تخيله. ولكن للقيام بهذه المهمة بشكل جيد ، تحتاج الذراع الآلية إلى مواد أكثر مما نراه في مشاريع "اصنعها بنفسك". أراد Pavel Surynek ذراعًا آليًا عالي الأداء والنتيجة هي RR1: Real Robot One ، الذي يتميز بتغذية مرتدة الحلقة المغلقة من أجل الدقة والتكرار.
في النظام الآلي ذي الحلقة المفتوحة ، تصدر وحدة التحكم أوامر تحديد الموقع فقط ولا تتلقى أي تعليقات. نظرًا لعدم وجود تعليقات ، لا تعرف وحدة التحكم ما إذا كان الموضع دقيقًا ولا يمكنها التعويض بشكل فعال عن مشكلات مثل رد الفعل العكسي في المحركات. توفر ملاحظات الحلقة المغلقة بيانات الموقع في الوقت الفعلي ، في الوقت الفعلي لوحدة التحكم ، حتى تتمكن من ضمان مطابقة النتائج لأوامر. يتلقى RR1 بيانات ردود الفعل ذات الحلقة المغلقة من أجهزة التشفير على كل من المفاصل الستة ، والتي يتم تشغيلها بواسطة محركات متدرجة من خلال رؤوس تروس كوكبية مطبوعة ثلاثية الأبعاد.

تتحكم لوحة Arduino Due في المحركات السائر عبر لوحات التشغيل وأجهزة الترميز. ينقل البيانات من جهاز التشفير إلى جهاز كمبيوتر يسمى RB1: Real Box One ويتلقى أوامر التحكم في المقابل. المستجيب النهائي الموضح هو مشبك قياسي وبقية الذراع عبارة عن مزيج من الأجزاء المطبوعة ثلاثية الأبعاد وبثق الألومنيوم. يبلغ الحد الأقصى للإصدار الحالي من RR1 80 سم ويمكن أن يرفع حوالي 2 كجم. إنه أمر مثير للإعجاب بالفعل ، لكن Surynek يخطط لتحسينه بمراجعة قادمة.
فريق Arduino - 15 أغسطس 2022
تعتبر الأذرع الروبوتية آلات متعددة الاستخدامات وهي رائعة لتعلم مبادئ الروبوتات أو حتى القيام ببعض الأعمال المفيدة للهواة. يمكن أن يتكون هذا العمل من اختيار المكونات ووضعها على لوحات الدوائر أو صناديق التغليف أو أي عنصر آخر يمكن تخيله. ولكن للقيام بهذه المهمة بشكل جيد ، تحتاج الذراع الآلية إلى مواد أكثر مما نراه في مشاريع "اصنعها بنفسك". أراد Pavel Surynek ذراعًا آليًا عالي الأداء والنتيجة هي RR1: Real Robot One ، الذي يتميز بتغذية مرتدة الحلقة المغلقة من أجل الدقة والتكرار.
في النظام الآلي ذي الحلقة المفتوحة ، تصدر وحدة التحكم أوامر تحديد الموقع فقط ولا تتلقى أي تعليقات. نظرًا لعدم وجود تعليقات ، لا تعرف وحدة التحكم ما إذا كان الموضع دقيقًا ولا يمكنها التعويض بشكل فعال عن مشكلات مثل رد الفعل العكسي في المحركات. توفر ملاحظات الحلقة المغلقة بيانات الموقع في الوقت الفعلي ، في الوقت الفعلي لوحدة التحكم ، حتى تتمكن من ضمان مطابقة النتائج لأوامر. يتلقى RR1 بيانات ردود الفعل ذات الحلقة المغلقة من أجهزة التشفير على كل من المفاصل الستة ، والتي يتم تشغيلها بواسطة محركات متدرجة من خلال رؤوس تروس كوكبية مطبوعة ثلاثية الأبعاد.
تتحكم لوحة Arduino Due في المحركات السائر عبر لوحات التشغيل وأجهزة الترميز. ينقل البيانات من جهاز التشفير إلى جهاز كمبيوتر يسمى RB1: Real Box One ويتلقى أوامر التحكم في المقابل. المستجيب النهائي الموضح هو مشبك قياسي وبقية الذراع عبارة عن مزيج من الأجزاء المطبوعة ثلاثية الأبعاد وبثق الألومنيوم. يبلغ الحد الأقصى للإصدار الحالي من RR1 80 سم ويمكن أن يرفع حوالي 2 كجم. إنه أمر مثير للإعجاب بالفعل ، لكن Surynek يخطط لتحسينه بمراجعة قادمة.
What's Your Reaction?