تجسس على قطتك لتتأكد من أنها تضع كفوفها بالداخل
[سكوت كاتلر] لديه قطة صغيرة ، [Cygnus] ، تحب الركض على عجلة قطة وكان لدى [سكوت] بعض الأسئلة المهمة حول استخدام [Cygnus] لعجلة القط مثل ، كم مرة يتم استخدامها ، أي اتجاه مفضل ومدى سرعة تقدم [Cygnus]. للإجابة على هذه الأسئلة ، وضع [سكوت] مستشعرات القياس عن بُعد على عجلة الدردشة وحلل النتائج.
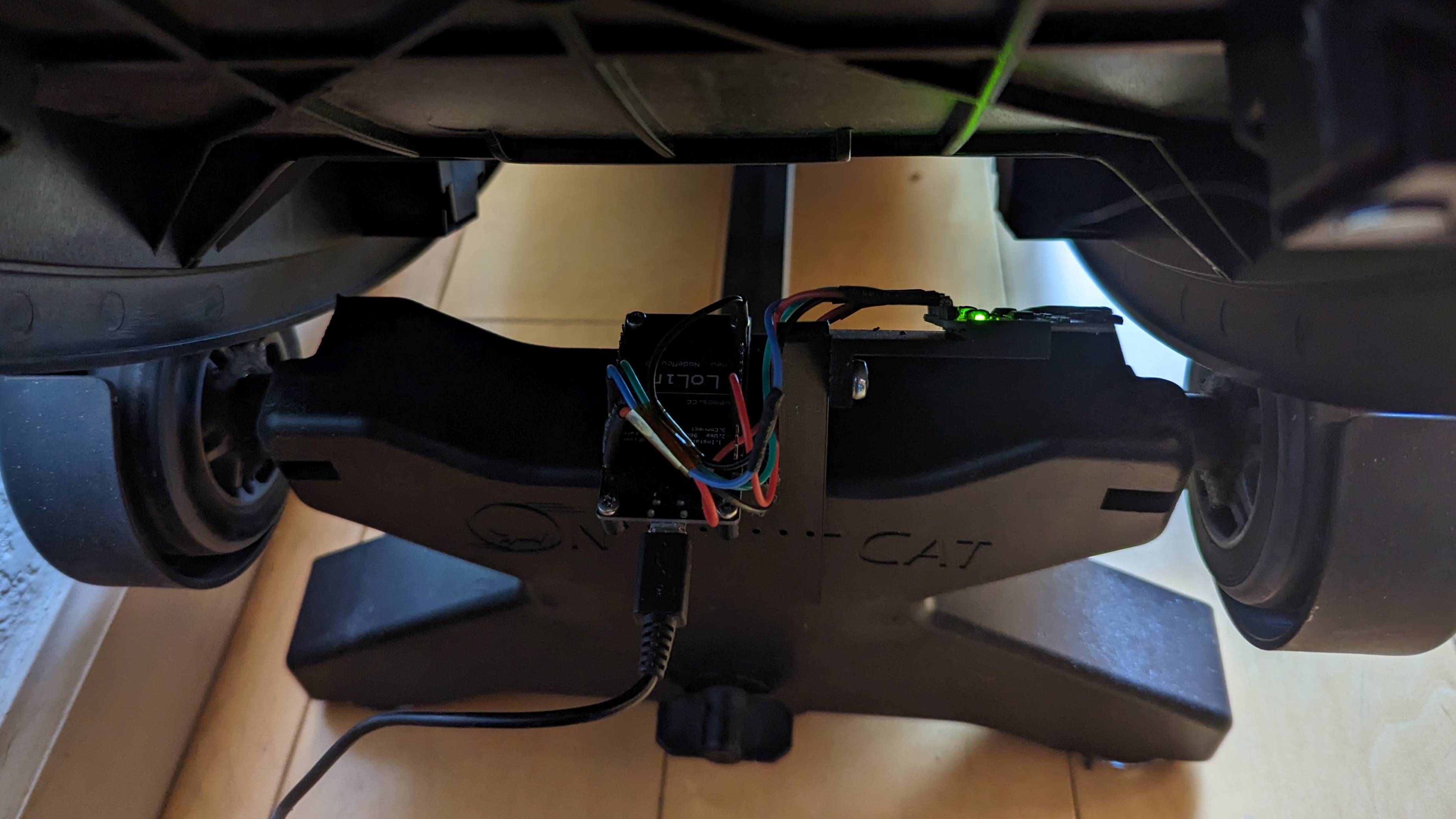
تم استخدام متحكم ESP8266 ووحدتين لتأثير القاعة 3144E لاكتشاف ثمانية مغناطيسات ملتصقة بالغلاف الخارجي لعجلة قطة "One Fast Cat". قام [سكوت] بتثبيت ESP8266 ووحدات تأثير القاعة على حامل قاعدة العجلة ، باستخدام أقواس مطبوعة ثلاثية الأبعاد لتثبيتها.
 بالنسبة إلى جانب البرنامج ، يقوم ESP8266 بإرفاق معالج مقاطعة في كل مرة يمر فيها جهاز استشعار ، ويسجل نافذة من ثلاثة قياسات سابقة لتحديد عينة صالح ، وفي حالة قبوله ، يستخدم الوقت بين العينات من أجل استنتاج الاتجاه والسرعة. يتصل ESP8266 بشبكة WiFi محلية معدة مسبقًا ولديه واجهة telnet لاسترداد معلومات السجل المخزنة ، في شكل بيانات JSON.
بالنسبة إلى جانب البرنامج ، يقوم ESP8266 بإرفاق معالج مقاطعة في كل مرة يمر فيها جهاز استشعار ، ويسجل نافذة من ثلاثة قياسات سابقة لتحديد عينة صالح ، وفي حالة قبوله ، يستخدم الوقت بين العينات من أجل استنتاج الاتجاه والسرعة. يتصل ESP8266 بشبكة WiFi محلية معدة مسبقًا ولديه واجهة telnet لاسترداد معلومات السجل المخزنة ، في شكل بيانات JSON.
[سكوت] على بعض الرسوم البيانية الرائعة وتصورات البيانات الأخرى حول استخدام [Cygnus] ، بما في ذلك تفضيل الجري في الساعة 3 صباحًا ، والوصول إلى سرعة قصوى تبلغ 22 كم / ساعة ومتوسط 4 ثوانٍ لكل ضربة. المصدر متاح على GitHub وتتوفر ملفات STL مضمنة في صياغة [سكوت]. لقد قدمنا متتبعات تمارين للقطط من قبل مع عجلة هامستر عملاقة مجهزة Raspberry Pi ومن الجيد رؤية بعض الخيارات التي تسمح بخيار التعديل التحديثي بالإضافة إلى حل DIY الكامل. >
[سكوت كاتلر] لديه قطة صغيرة ، [Cygnus] ، تحب الركض على عجلة قطة وكان لدى [سكوت] بعض الأسئلة المهمة حول استخدام [Cygnus] لعجلة القط مثل ، كم مرة يتم استخدامها ، أي اتجاه مفضل ومدى سرعة تقدم [Cygnus]. للإجابة على هذه الأسئلة ، وضع [سكوت] مستشعرات القياس عن بُعد على عجلة الدردشة وحلل النتائج.
تم استخدام متحكم ESP8266 ووحدتين لتأثير القاعة 3144E لاكتشاف ثمانية مغناطيسات ملتصقة بالغلاف الخارجي لعجلة قطة "One Fast Cat". قام [سكوت] بتثبيت ESP8266 ووحدات تأثير القاعة على حامل قاعدة العجلة ، باستخدام أقواس مطبوعة ثلاثية الأبعاد لتثبيتها.
بالنسبة إلى جانب البرنامج ، يقوم ESP8266 بإرفاق معالج مقاطعة في كل مرة يمر فيها جهاز استشعار ، ويسجل نافذة من ثلاثة قياسات سابقة لتحديد عينة صالح ، وفي حالة قبوله ، يستخدم الوقت بين العينات من أجل استنتاج الاتجاه والسرعة. يتصل ESP8266 بشبكة WiFi محلية معدة مسبقًا ولديه واجهة telnet لاسترداد معلومات السجل المخزنة ، في شكل بيانات JSON.
[سكوت] على بعض الرسوم البيانية الرائعة وتصورات البيانات الأخرى حول استخدام [Cygnus] ، بما في ذلك تفضيل الجري في الساعة 3 صباحًا ، والوصول إلى سرعة قصوى تبلغ 22 كم / ساعة ومتوسط 4 ثوانٍ لكل ضربة. المصدر متاح على GitHub وتتوفر ملفات STL مضمنة في صياغة [سكوت]. لقد قدمنا متتبعات تمارين للقطط من قبل مع عجلة هامستر عملاقة مجهزة Raspberry Pi ومن الجيد رؤية بعض الخيارات التي تسمح بخيار التعديل التحديثي بالإضافة إلى حل DIY الكامل. >
What's Your Reaction?





















