Ein selbstbalancierender 3D-gedruckter Roboter erweckt die Steuerungstheorie zum Leben
Die Stabilisierung eines umgekehrten Pendels ist ein klassisches Problem der Steuerungstheorie, und wenn Sie jemals einen Kurs über Steuerungssysteme besucht haben, erinnern Sie sich vielleicht daran, Seiten voller Gleichungen, Differentiale und Bode-Diagramme gesehen zu haben, nur um seine grundlegende Funktionsweise zu beschreiben. Während dies ein solches System furchtbar kompliziert machen kann, muss die Umsetzung dieser ganzen Theorie überhaupt nicht schwierig sein, wie [Limenitis Reducta] in seinem neuesten Projekt demonstriert. Alles, was Sie brauchen, ist ein 3D-Drucker, einige grundlegende Elektronikkenntnisse und Python-Kenntnisse.
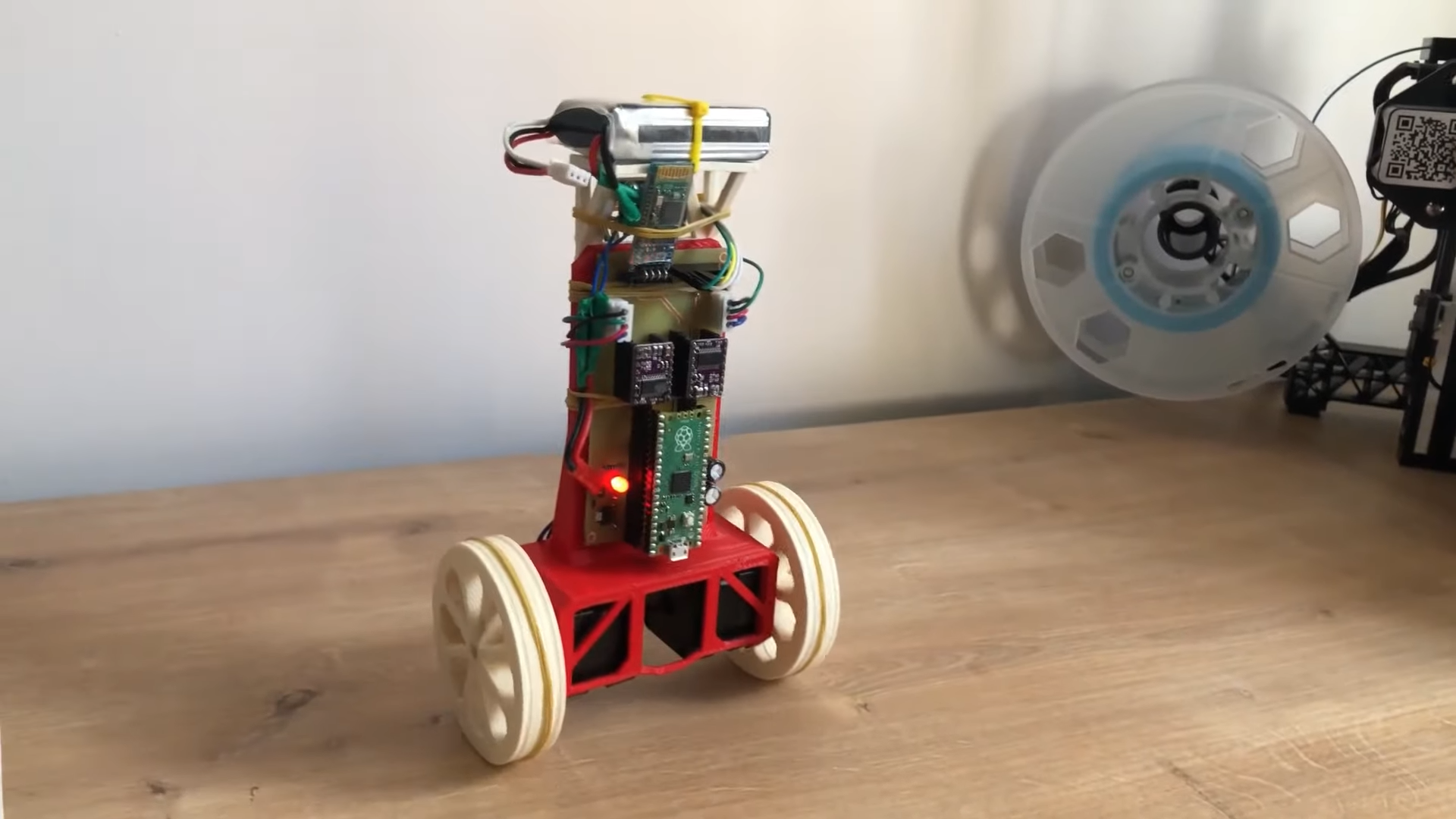
Die benötigten Komponenten sind eine Karosserie, zwei Räder, Motoren zum Antrieb dieser Räder und Elektronik. [Limenitis] demonstriert den Designprozess im folgenden Video (auf Türkisch, mit verfügbaren englischen Untertiteln), in dem er das gesamte System in Fusion 360 zeichnet und dann mit der Herstellung fortfährt. Der Körper und die Räder sind 3D-gedruckt, wobei Gummibänder den Rädern eine gewisse Traktion verleihen, die sonst auf rutschigen Oberflächen zu kämpfen hätten.
 Die Leiterplatte besteht aus nur wenigen Komponenten, wobei der größte Teil der Komplexität von Plug-in-Modulen bewältigt wird.
Die Leiterplatte besteht aus nur wenigen Komponenten, wobei der größte Teil der Komplexität von Plug-in-Modulen bewältigt wird.Zwei Schrittmotoren treiben die Räder an, die von einem DRV8825-Motortreiber gesteuert werden, während ein MPU-9250-Beschleunigungsmesser und ein Gyroskop misst den Winkel und die Beschleunigung des Systems. Der Regelkreis wird durch einen Raspberry Pi Pico geschlossen, der einen PID-Regler implementiert: ein weiterer Klassiker der Regelungstheorie, bei dem proportionale, integrale und ableitende Parameter verwendet werden sind abgestimmt, um den Regelkreis an das betreffende physikalische System anzupassen. Externe Eingaben können über eine Bluetooth-Verbindung bereitgestellt werden, sodass der Roboter von einem PC oder Smartphone aus gesteuert und durch Ihr Wohnzimmer geführt werden kann.
Alle Designdateien und Software sind auf der [Limenitis] GitHub-Seite verfügbar und sind ein guter Ausgangspunkt, wenn Sie etwas von dieser Steuerungstheorie üben möchten. Selbstbalancierende Roboter sind ein Favorit von Robotik-Hackern. An Beispielen mangelt es also nicht, wenn Sie mehr Inspiration brauchen, bevor Sie Ihre eigenen erstellen: Sie können sie aus Standardteilen, Holzstücken oder sogar einem Roboter ohne Schweißen bauen. Steckbrett.
Die Stabilisierung eines umgekehrten Pendels ist ein klassisches Problem der Steuerungstheorie, und wenn Sie jemals einen Kurs über Steuerungssysteme besucht haben, erinnern Sie sich vielleicht daran, Seiten voller Gleichungen, Differentiale und Bode-Diagramme gesehen zu haben, nur um seine grundlegende Funktionsweise zu beschreiben. Während dies ein solches System furchtbar kompliziert machen kann, muss die Umsetzung dieser ganzen Theorie überhaupt nicht schwierig sein, wie [Limenitis Reducta] in seinem neuesten Projekt demonstriert. Alles, was Sie brauchen, ist ein 3D-Drucker, einige grundlegende Elektronikkenntnisse und Python-Kenntnisse.
Die benötigten Komponenten sind eine Karosserie, zwei Räder, Motoren zum Antrieb dieser Räder und Elektronik. [Limenitis] demonstriert den Designprozess im folgenden Video (auf Türkisch, mit verfügbaren englischen Untertiteln), in dem er das gesamte System in Fusion 360 zeichnet und dann mit der Herstellung fortfährt. Der Körper und die Räder sind 3D-gedruckt, wobei Gummibänder den Rädern eine gewisse Traktion verleihen, die sonst auf rutschigen Oberflächen zu kämpfen hätten.
Die Leiterplatte besteht aus nur wenigen Komponenten, wobei der größte Teil der Komplexität von Plug-in-Modulen bewältigt wird.Zwei Schrittmotoren treiben die Räder an, die von einem DRV8825-Motortreiber gesteuert werden, während ein MPU-9250-Beschleunigungsmesser und ein Gyroskop misst den Winkel und die Beschleunigung des Systems. Der Regelkreis wird durch einen Raspberry Pi Pico geschlossen, der einen PID-Regler implementiert: ein weiterer Klassiker der Regelungstheorie, bei dem proportionale, integrale und ableitende Parameter verwendet werden sind abgestimmt, um den Regelkreis an das betreffende physikalische System anzupassen. Externe Eingaben können über eine Bluetooth-Verbindung bereitgestellt werden, sodass der Roboter von einem PC oder Smartphone aus gesteuert und durch Ihr Wohnzimmer geführt werden kann.
Alle Designdateien und Software sind auf der [Limenitis] GitHub-Seite verfügbar und sind ein guter Ausgangspunkt, wenn Sie etwas von dieser Steuerungstheorie üben möchten. Selbstbalancierende Roboter sind ein Favorit von Robotik-Hackern. An Beispielen mangelt es also nicht, wenn Sie mehr Inspiration brauchen, bevor Sie Ihre eigenen erstellen: Sie können sie aus Standardteilen, Holzstücken oder sogar einem Roboter ohne Schweißen bauen. Steckbrett.
What's Your Reaction?



















