Erhöhen Sie die Nutzlastkapazität eines Roboterarms, indem Sie seine Handgelenkmotoren bewegen

Um einem Elektroauto mehr Reichweite zu verleihen, braucht man eine größere Batterie. Aber das erhöht das Gewicht, sodass Sie zum Ausgleich größere Motoren und mehr Batteriekapazität benötigen. Dadurch entsteht ein Teufelskreis, und Roboterarme sind anfällig für ein ähnliches Problem. Ein Roboterarm muss zusätzlich zu allem, was er aufnimmt, sein eigenes Gewicht heben. Größere Motoren zum Erhöhen der Nutzlastkapazität erhöhen auch das Gewicht, wodurch die Nutzlastkapazität verringert wird. Dieses Video von RoTechnic beschreibt, wie Sie diesen Kreislauf mit ferngesteuerten Motoren vermeiden können.
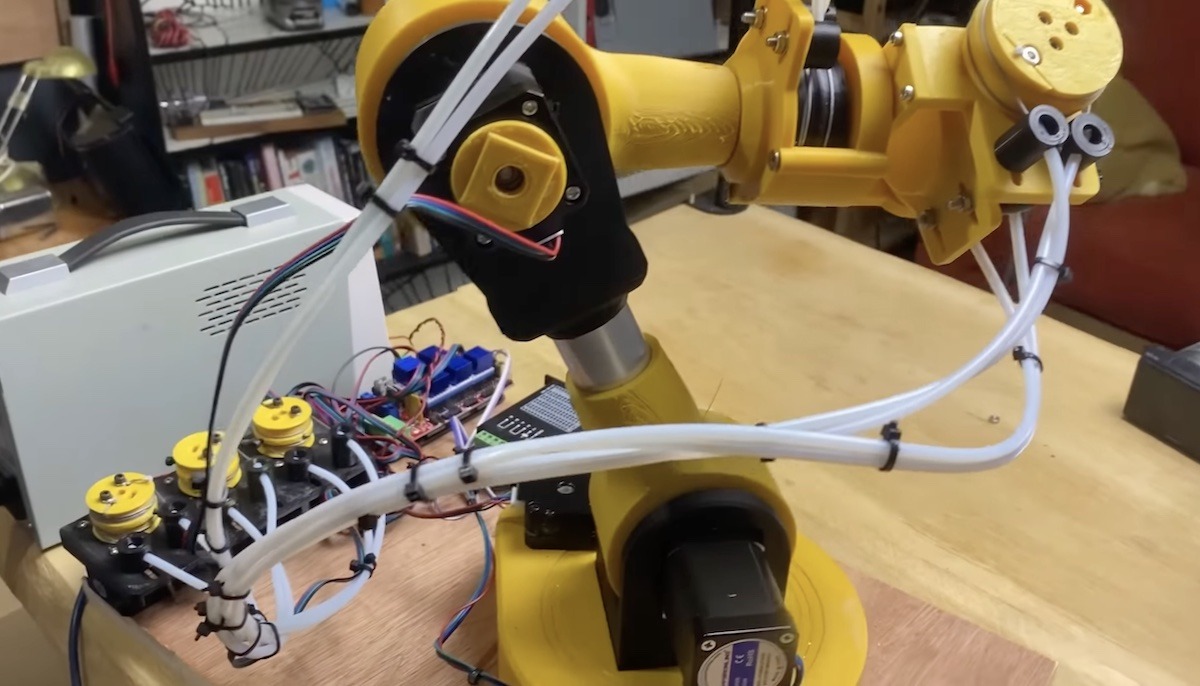
Der Roboterarm von RoTechnic hat sechs Freiheitsgrade (DoF): eine drehbare Basis, ein Schultergelenk, ein Ellbogengelenk, ein drehbares Handgelenk, ein neigbares Handgelenk und einen drehbaren Endeffektor . Wenn der Roboter ein herkömmliches Design hätte, würden alle diese Gelenke (mit Ausnahme der ersten beiden) einen Motor erfordern, der zum Heben ein zusätzliches Hebelgewicht hinzufügt. Das Gewicht dieser Motoren würde von dem Betrag abgezogen, den der Arm ansonsten heben könnte. Aber drei der Motoren dieses Roboters ruhen auf dem Tisch in der Nähe, sodass er sie nicht anheben muss.

RoTechnic verwendete ein Arduino Mega 2560-Board zur Steuerung dieser Motoren. Die meisten anderen Teile des Roboters wurden 3D-gedruckt. Einige der Motoren, wie zum Beispiel für die Basisrotation und das Schultergelenk, bleiben an der herkömmlichen Stelle. Aber drei der Motoren betreiben ihre Gelenke über Angelschnüre, die durch Bowden-Röhren geführt werden. Motoren haben Spulen und wenn diese sich drehen, lockern sie eine Leine, während sie die andere straffen. Jedes Gelenk hat eine ähnliche Spule, sodass die Angelschnüre sie drehen. Die einzige Einschränkung besteht darin, dass sich ein Joint nicht unbegrenzt drehen kann, aber dies kann abgemildert werden, indem die Angelschnur mehrmals um jede Spule gewickelt wird, um eine entsprechende Anzahl von Drehungen zu erzielen.
Diese Technik wird in der Robotikbranche schon länger als die Computersteuerung verwendet und ist nicht revolutionär. Aber der RoTechnic-Build zeigt, wie einfach es für Bastler ist, die Technik in ihre Roboterkonstruktionen zu integrieren.
Um einem Elektroauto mehr Reichweite zu verleihen, braucht man eine größere Batterie. Aber das erhöht das Gewicht, sodass Sie zum Ausgleich größere Motoren und mehr Batteriekapazität benötigen. Dadurch entsteht ein Teufelskreis, und Roboterarme sind anfällig für ein ähnliches Problem. Ein Roboterarm muss zusätzlich zu allem, was er aufnimmt, sein eigenes Gewicht heben. Größere Motoren zum Erhöhen der Nutzlastkapazität erhöhen auch das Gewicht, wodurch die Nutzlastkapazität verringert wird. Dieses Video von RoTechnic beschreibt, wie Sie diesen Kreislauf mit ferngesteuerten Motoren vermeiden können.
Der Roboterarm von RoTechnic hat sechs Freiheitsgrade (DoF): eine drehbare Basis, ein Schultergelenk, ein Ellbogengelenk, ein drehbares Handgelenk, ein neigbares Handgelenk und einen drehbaren Endeffektor . Wenn der Roboter ein herkömmliches Design hätte, würden alle diese Gelenke (mit Ausnahme der ersten beiden) einen Motor erfordern, der zum Heben ein zusätzliches Hebelgewicht hinzufügt. Das Gewicht dieser Motoren würde von dem Betrag abgezogen, den der Arm ansonsten heben könnte. Aber drei der Motoren dieses Roboters ruhen auf dem Tisch in der Nähe, sodass er sie nicht anheben muss.
RoTechnic verwendete ein Arduino Mega 2560-Board zur Steuerung dieser Motoren. Die meisten anderen Teile des Roboters wurden 3D-gedruckt. Einige der Motoren, wie zum Beispiel für die Basisrotation und das Schultergelenk, bleiben an der herkömmlichen Stelle. Aber drei der Motoren betreiben ihre Gelenke über Angelschnüre, die durch Bowden-Röhren geführt werden. Motoren haben Spulen und wenn diese sich drehen, lockern sie eine Leine, während sie die andere straffen. Jedes Gelenk hat eine ähnliche Spule, sodass die Angelschnüre sie drehen. Die einzige Einschränkung besteht darin, dass sich ein Joint nicht unbegrenzt drehen kann, aber dies kann abgemildert werden, indem die Angelschnur mehrmals um jede Spule gewickelt wird, um eine entsprechende Anzahl von Drehungen zu erzielen.
Diese Technik wird in der Robotikbranche schon länger als die Computersteuerung verwendet und ist nicht revolutionär. Aber der RoTechnic-Build zeigt, wie einfach es für Bastler ist, die Technik in ihre Roboterkonstruktionen zu integrieren.
What's Your Reaction?



















