Mini Cheetah Clone Teardown, von niemand anderem als dem ursprünglichen Designer
[Ben Katz] entwarf den ursprünglichen MIT Mini Cheetah-Roboter, der mit seinen entschieden nicht-roboterhaften Bewegungen und Rückwärtssaltos die Aufmerksamkeit und Fantasie auf sich zieht. Kurz nachdem [Ben]s Masterarbeit online gegangen war, tauchten von ausländischen Anbietern Klone der Aktuatoren auf, und einige Monate später Klone des gesamten Roboters. [Ben] hatte kürzlich die Gelegenheit, einen solchen Dogotix-Klon zu zerlegen und zu sehen, was sich darin befand.
 Begegnung zwischen Mini-Schaf und Mini-Gepard.
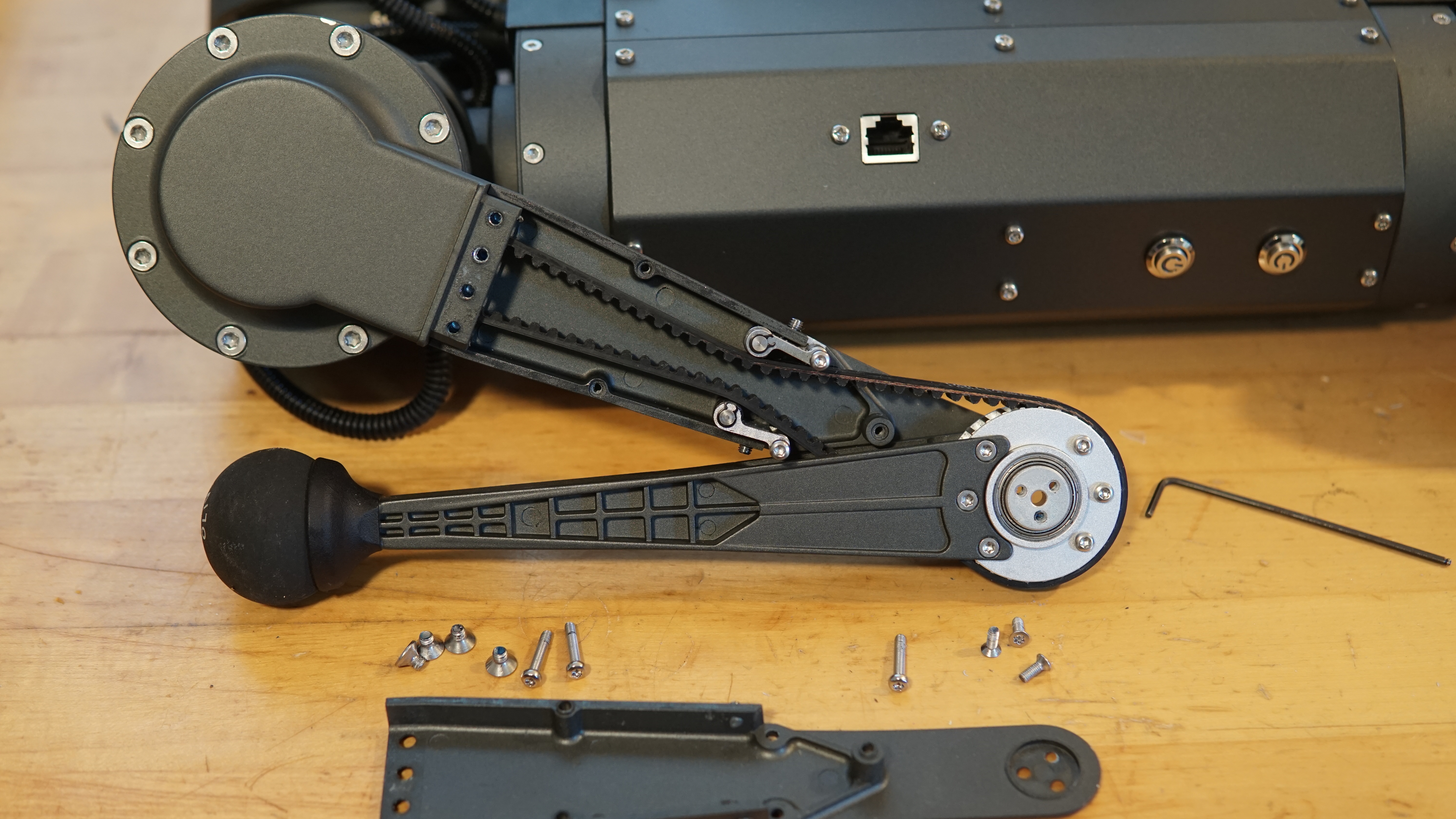
Begegnung zwischen Mini-Schaf und Mini-Gepard.Amüsanterweise bemerkte er als eines der ersten Dinge, dass die "Füße" immer noch nur normale Squashbälle sind, identisch mit seinem ursprünglichen Design als Mini-Gepard. Wie beim Rest des Beins befindet sich im Inneren ein Riemen, der vor Spannschlössern verläuft und das Kniegelenk mit einem Aktuator in der Schulter verbindet.
Wie zu erwarten, stehen diese Teile unter etwas Stress, also müssen sie stark sein. Dieses Design ermöglicht schlanke, aber starke Beine, ohne einen Aktuator in das Kniegelenk einzubauen, und Sie erinnern sich vielleicht, dass wir gesehen haben, wie ein ähnlicher Roboter durch das Hinzufügen einer starren Schiene die Fähigkeit zum Stehen erlangte.
Es ist interessant, die Gedanken von [Ben] zu lesen, während er die Einheit zerlegt und fotografiert, und Sie müssen seinen Beitrag lesen, um sie alle zu erfassen. Aber warum nehmen Sie sich in der Zwischenzeit nicht einen Moment Zeit, um zu sehen, wie die neugierigen Schafe eines Nachbarn auf den Roboter im unten eingebetteten Video reagieren? Der Roboter verfehlt wegen schwacher Batterie einen Rückwärtssalto, aber die Schafe scheinen trotzdem angemessen beeindruckt zu sein.
[Ben Katz] entwarf den ursprünglichen MIT Mini Cheetah-Roboter, der mit seinen entschieden nicht-roboterhaften Bewegungen und Rückwärtssaltos die Aufmerksamkeit und Fantasie auf sich zieht. Kurz nachdem [Ben]s Masterarbeit online gegangen war, tauchten von ausländischen Anbietern Klone der Aktuatoren auf, und einige Monate später Klone des gesamten Roboters. [Ben] hatte kürzlich die Gelegenheit, einen solchen Dogotix-Klon zu zerlegen und zu sehen, was sich darin befand.
Begegnung zwischen Mini-Schaf und Mini-Gepard.Amüsanterweise bemerkte er als eines der ersten Dinge, dass die "Füße" immer noch nur normale Squashbälle sind, identisch mit seinem ursprünglichen Design als Mini-Gepard. Wie beim Rest des Beins befindet sich im Inneren ein Riemen, der vor Spannschlössern verläuft und das Kniegelenk mit einem Aktuator in der Schulter verbindet.
Wie zu erwarten, stehen diese Teile unter etwas Stress, also müssen sie stark sein. Dieses Design ermöglicht schlanke, aber starke Beine, ohne einen Aktuator in das Kniegelenk einzubauen, und Sie erinnern sich vielleicht, dass wir gesehen haben, wie ein ähnlicher Roboter durch das Hinzufügen einer starren Schiene die Fähigkeit zum Stehen erlangte.
Es ist interessant, die Gedanken von [Ben] zu lesen, während er die Einheit zerlegt und fotografiert, und Sie müssen seinen Beitrag lesen, um sie alle zu erfassen. Aber warum nehmen Sie sich in der Zwischenzeit nicht einen Moment Zeit, um zu sehen, wie die neugierigen Schafe eines Nachbarn auf den Roboter im unten eingebetteten Video reagieren? Der Roboter verfehlt wegen schwacher Batterie einen Rückwärtssalto, aber die Schafe scheinen trotzdem angemessen beeindruckt zu sein.
What's Your Reaction?



















