Das MIT entwickelt ein Bewegungs- und Aufgabenplanungssystem für Haushaltsroboter
Warum gibt es nicht mehr Roboter in den Häusern? Es ist eine komplexe und überraschende Frage – und unsere Häuser sind überraschend komplexe Orte. Ein großer Teil des Erfolgs autonomer Systeme in Lagern und Fabriken ist die relative Leichtigkeit, sich in einer strukturierten Umgebung zurechtzufinden. Natürlich erfordern die meisten Systeme immer noch die Zuordnung eines Raums, bevor man mit der Arbeit beginnen kann, aber wenn das erst einmal vorhanden ist, gibt es normalerweise nur noch wenige Variationen.
Häuser hingegen sind eine Art Albtraum. Sie unterscheiden sich nicht nur stark von Einheit zu Einheit, sondern sind auch voller feindseliger Hindernisse und neigen dazu, recht dynamisch zu sein, wenn Möbel bewegt werden oder Gegenstände auf dem Boden liegen bleiben. Staubsauger sind die am weitesten verbreiteten Roboter im Haushalt und werden auch nach Jahrzehnten auf dem Markt immer noch perfektioniert.
Diese Woche präsentieren Forscher am MIT CSAIL PIGINet (Plans, Images, Goal, and Initial Facts), das darauf ausgelegt ist, die Aufgaben- und Bewegungsplanung in Heimrobotersysteme zu integrieren. Das neuronale Netzwerk soll dazu beitragen, ihre Fähigkeit zu optimieren, Aktionspläne in verschiedenen Umgebungen zu erstellen.
MIT erklärt PIGINet folgendermaßen:
[I]t verwendet einen transformatorbasierten Encoder, ein hochmodernes, vielseitiges Design, das für die Verarbeitung von Datensequenzen entwickelt wurde. Die Eingabesequenz besteht in diesem Fall aus Informationen über den vorgesehenen Aufgabenplan, Bildern der Umgebung und symbolischen Kodierungen des Ausgangszustands und des gewünschten Ziels. Der Encoder kombiniert die Aufgabenpläne, Bilder und Texte, um eine Vorhersage hinsichtlich der Durchführbarkeit des ausgewählten Aufgabenplans zu erstellen.
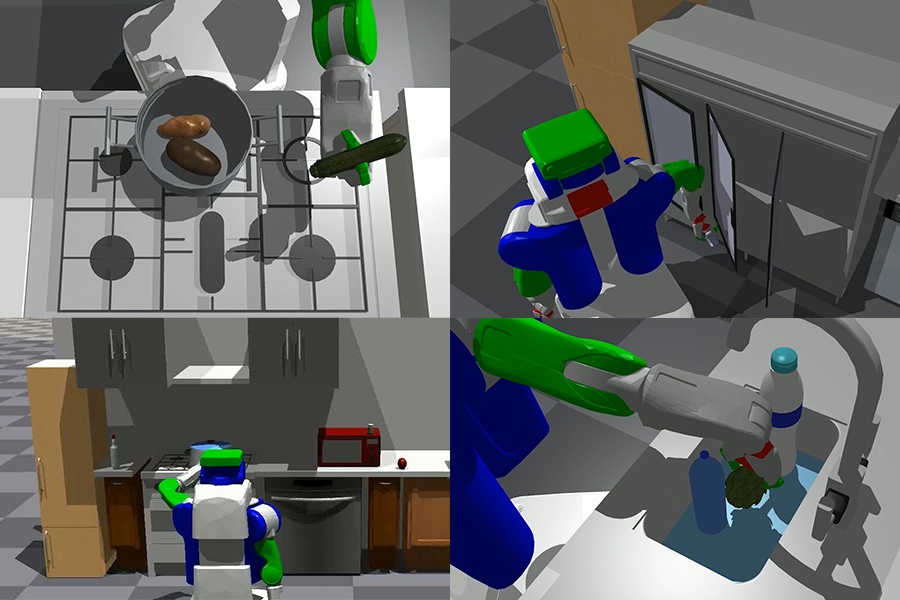
Das System konzentriert sich derzeit hauptsächlich auf Küchenaktivitäten. Es stützt sich auf simulierte Wohnumgebungen, um Pläne zu erstellen, die Interaktionen mit verschiedenen Elementen der Umgebung erfordern, wie z. B. Theken, Schränken, Kühlschränken, Waschbecken usw. Die Forscher behaupten, dass PIGINet in einfacheren Szenarien die Planungszeit um 80 % reduzieren konnte. Bei komplexeren Situationen lag diese Zahl normalerweise bei etwa 20–50 %.
Das Team meint, dass Häuser nur der Anfang sind.
„Die praktischen Anwendungen von PIGINet beschränken sich nicht nur auf Haushalte“, sagt Zhutian Yang, Doktorand. „Unser zukünftiges Ziel besteht darin, PIGINet so zu verfeinern, dass nach der Identifizierung undurchführbarer Aktionen alternative Aufgabenpläne vorgeschlagen werden, was die Generierung realisierbarer Aufgabenpläne weiter beschleunigen wird, ohne dass große Datensätze erforderlich sind, um einen Allzweckplaner von Grund auf zu trainieren. Wir glauben, dass dies revolutionär sein könnte.“ die Art und Weise, wie Roboter während der Entwicklung trainiert und dann in jedem Haus eingesetzt werden.“
Warum gibt es nicht mehr Roboter in den Häusern? Es ist eine komplexe und überraschende Frage – und unsere Häuser sind überraschend komplexe Orte. Ein großer Teil des Erfolgs autonomer Systeme in Lagern und Fabriken ist die relative Leichtigkeit, sich in einer strukturierten Umgebung zurechtzufinden. Natürlich erfordern die meisten Systeme immer noch die Zuordnung eines Raums, bevor man mit der Arbeit beginnen kann, aber wenn das erst einmal vorhanden ist, gibt es normalerweise nur noch wenige Variationen.
Häuser hingegen sind eine Art Albtraum. Sie unterscheiden sich nicht nur stark von Einheit zu Einheit, sondern sind auch voller feindseliger Hindernisse und neigen dazu, recht dynamisch zu sein, wenn Möbel bewegt werden oder Gegenstände auf dem Boden liegen bleiben. Staubsauger sind die am weitesten verbreiteten Roboter im Haushalt und werden auch nach Jahrzehnten auf dem Markt immer noch perfektioniert.
Diese Woche präsentieren Forscher am MIT CSAIL PIGINet (Plans, Images, Goal, and Initial Facts), das darauf ausgelegt ist, die Aufgaben- und Bewegungsplanung in Heimrobotersysteme zu integrieren. Das neuronale Netzwerk soll dazu beitragen, ihre Fähigkeit zu optimieren, Aktionspläne in verschiedenen Umgebungen zu erstellen.
MIT erklärt PIGINet folgendermaßen:
[I]t verwendet einen transformatorbasierten Encoder, ein hochmodernes, vielseitiges Design, das für die Verarbeitung von Datensequenzen entwickelt wurde. Die Eingabesequenz besteht in diesem Fall aus Informationen über den vorgesehenen Aufgabenplan, Bildern der Umgebung und symbolischen Kodierungen des Ausgangszustands und des gewünschten Ziels. Der Encoder kombiniert die Aufgabenpläne, Bilder und Texte, um eine Vorhersage hinsichtlich der Durchführbarkeit des ausgewählten Aufgabenplans zu erstellen.
Das System konzentriert sich derzeit hauptsächlich auf Küchenaktivitäten. Es stützt sich auf simulierte Wohnumgebungen, um Pläne zu erstellen, die Interaktionen mit verschiedenen Elementen der Umgebung erfordern, wie z. B. Theken, Schränken, Kühlschränken, Waschbecken usw. Die Forscher behaupten, dass PIGINet in einfacheren Szenarien die Planungszeit um 80 % reduzieren konnte. Bei komplexeren Situationen lag diese Zahl normalerweise bei etwa 20–50 %.
Das Team meint, dass Häuser nur der Anfang sind.
„Die praktischen Anwendungen von PIGINet beschränken sich nicht nur auf Haushalte“, sagt Zhutian Yang, Doktorand. „Unser zukünftiges Ziel besteht darin, PIGINet so zu verfeinern, dass nach der Identifizierung undurchführbarer Aktionen alternative Aufgabenpläne vorgeschlagen werden, was die Generierung realisierbarer Aufgabenpläne weiter beschleunigen wird, ohne dass große Datensätze erforderlich sind, um einen Allzweckplaner von Grund auf zu trainieren. Wir glauben, dass dies revolutionär sein könnte.“ die Art und Weise, wie Roboter während der Entwicklung trainiert und dann in jedem Haus eingesetzt werden.“
What's Your Reaction?


















