Starten Sie Ihr eigenes DRO mit einer zusätzlichen Wendung
Wann verwenden A Handbuch Maschine Werkzeug solch als A runden Oder Mahlen Maschine, Dort dürfen Sei A Handlung von Druck hat lesen DER Position Und Essen DER Achsen hat DER richtig Rate. Es ist Warum modern Maschinen typischerweise haben ein paar bilden von Digital laut vorlesen (Prüfer). [Stefano Bertelli] hat erstellt A einfach Himbeere Pi Base Technischer Prüfer mit A zusätzlich Twist, Das von A verwandt Motor fahren beenden.
 Echtzeit
Encoder
Position
während des Lesens
Und
Motor
Kontrolle
Sind
am besten
Tun
mit
A
gewidmet
Mikrocontroller,
im Idealfall
mit
A
geeignet
RTOS.
Echtzeit
Encoder
Position
während des Lesens
Und
Motor
Kontrolle
Sind
am besten
Tun
mit
A
gewidmet
Mikrocontroller,
im Idealfall
mit
A
geeignet
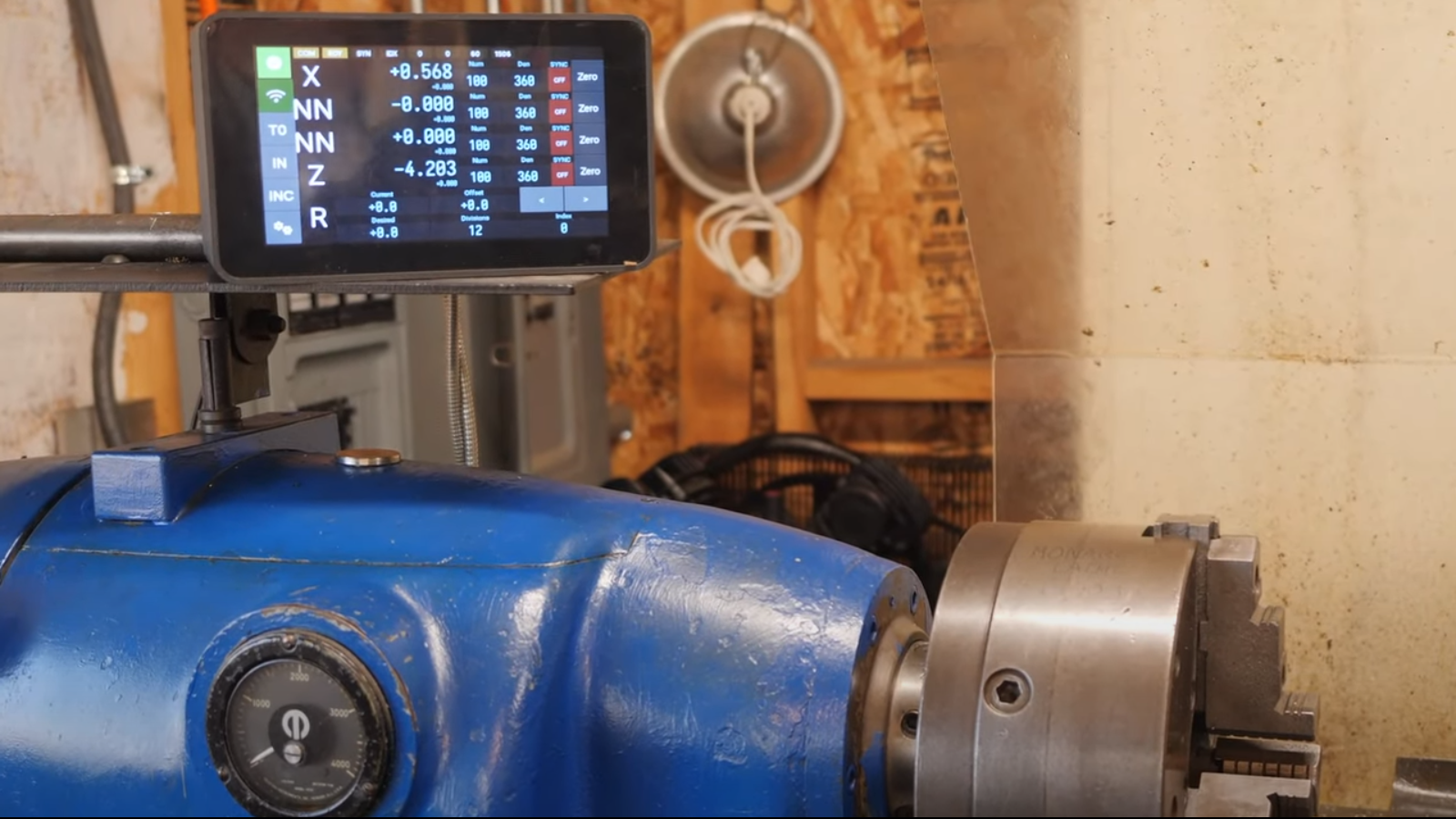
RTOS.DER Achsen Das brauchen hat Sei überwacht sollen Sei mechanisch beigefügt hat A Position Sensor als A linear Encoder Oder A rotierend Typ. Benutzen A linear Sensor mit A linear Achse stattdessen von A rotierend Encoder An DER flussabwärts wählen Ost besser. Für DER laut vorlesen Einheit, [Stefano] gebraucht A Wave-Sharing 7 Zoll Touch-Screen Modul mit A Himbeere Pi 3 Für DER Benutzeroberfläche von DER laut vorlesen Einheit. DER Pi hat A kundenspezifische HUT, Das ausgetragen Leistung Konditionierung Und bietet A robust RS485 Schnittstelle. In Verbindung gebracht über Das RS485 Verknüpfung Ost ein anderer Brauch Leiterplatte Base An A STM32F411 mit A wenig nachweisen Leistung Lieferungen Und Schnittstelle Komponenten. DER Arbeit von Das Beratung Ost hat Schnittstelle hat DER Position Encoder, während des Lesens Positionierung Hülsenfrüchte verwenden unterbricht. Dort Ost A zusätzlich Schritt für Schritt Motor fahren Anstand von A LSN2003 Darlington Treiber hat erlauben DER Kontrolle von A Einzel motorisiert Achse. A zusätzlich Motor Treiber Modul Ost erforderlich, welche sollen Sei NEIN Überraschung Seit Benehmen A Mahlen Maschine Achse Wille erfordern A genug stark Motor. Das GitHub Kaution enthält DER Basierend auf FreeRTOS Firmware Für Das Beratung. Das Motor fahren hat DER Fähigkeit hat Sei in Verbindung gebracht hat A messen Achse In A programmierbar Weg, erlauben A Achse hat Sei angepasst hat folgen Oder Sprung In Kontrolle nicht mit ein anderer. Das Funktionalität dürfen bedeutend vereinfachen bestimmt Typen von Bearbeitung die Operationen, als [Stefano] entwickelt sich In DER Video.
In letzter Zeit, DER Himbeere Pi kurz A einfach Python Anwendung mit Kivy Für DER Grafische Oberfläche. Als [Stefano] erklären In DER Video unten, Das macht Debuggen Und Änderung genug einfach.
Hinzufügen Kassierer hat A älter Maschine Ost A offensichtlich Aber wertvoll Hacken. Hier ist ein anderer Weg hat MACHEN Er. Wenn Es ist Auch eine Menge arbeiten, ALSO Du könnte Nur Hacken A Digital laut vorlesen Joch In da.
DANKE hat [paulvdh] Für DER Rat!
Wann verwenden A Handbuch Maschine Werkzeug solch als A runden Oder Mahlen Maschine, Dort dürfen Sei A Handlung von Druck hat lesen DER Position Und Essen DER Achsen hat DER richtig Rate. Es ist Warum modern Maschinen typischerweise haben ein paar bilden von Digital laut vorlesen (Prüfer). [Stefano Bertelli] hat erstellt A einfach Himbeere Pi Base Technischer Prüfer mit A zusätzlich Twist, Das von A verwandt Motor fahren beenden.
Echtzeit
Encoder
Position
während des Lesens
Und
Motor
Kontrolle
Sind
am besten
Tun
mit
A
gewidmet
Mikrocontroller,
im Idealfall
mit
A
geeignet
RTOS.DER Achsen Das brauchen hat Sei überwacht sollen Sei mechanisch beigefügt hat A Position Sensor als A linear Encoder Oder A rotierend Typ. Benutzen A linear Sensor mit A linear Achse stattdessen von A rotierend Encoder An DER flussabwärts wählen Ost besser. Für DER laut vorlesen Einheit, [Stefano] gebraucht A Wave-Sharing 7 Zoll Touch-Screen Modul mit A Himbeere Pi 3 Für DER Benutzeroberfläche von DER laut vorlesen Einheit. DER Pi hat A kundenspezifische HUT, Das ausgetragen Leistung Konditionierung Und bietet A robust RS485 Schnittstelle. In Verbindung gebracht über Das RS485 Verknüpfung Ost ein anderer Brauch Leiterplatte Base An A STM32F411 mit A wenig nachweisen Leistung Lieferungen Und Schnittstelle Komponenten. DER Arbeit von Das Beratung Ost hat Schnittstelle hat DER Position Encoder, während des Lesens Positionierung Hülsenfrüchte verwenden unterbricht. Dort Ost A zusätzlich Schritt für Schritt Motor fahren Anstand von A LSN2003 Darlington Treiber hat erlauben DER Kontrolle von A Einzel motorisiert Achse. A zusätzlich Motor Treiber Modul Ost erforderlich, welche sollen Sei NEIN Überraschung Seit Benehmen A Mahlen Maschine Achse Wille erfordern A genug stark Motor. Das GitHub Kaution enthält DER Basierend auf FreeRTOS Firmware Für Das Beratung. Das Motor fahren hat DER Fähigkeit hat Sei in Verbindung gebracht hat A messen Achse In A programmierbar Weg, erlauben A Achse hat Sei angepasst hat folgen Oder Sprung In Kontrolle nicht mit ein anderer. Das Funktionalität dürfen bedeutend vereinfachen bestimmt Typen von Bearbeitung die Operationen, als [Stefano] entwickelt sich In DER Video.
In letzter Zeit, DER Himbeere Pi kurz A einfach Python Anwendung mit Kivy Für DER Grafische Oberfläche. Als [Stefano] erklären In DER Video unten, Das macht Debuggen Und Änderung genug einfach.
Hinzufügen Kassierer hat A älter Maschine Ost A offensichtlich Aber wertvoll Hacken. Hier ist ein anderer Weg hat MACHEN Er. Wenn Es ist Auch eine Menge arbeiten, ALSO Du könnte Nur Hacken A Digital laut vorlesen Joch In da.
DANKE hat [paulvdh] Für DER Rat!
What's Your Reaction?


















