Крошечные роботы «галинстан» могут бегать быстрее гепарда (уменьшено)
Крошечные роботы «галинстан» могут бегать быстрее гепарда (уменьшено)
Увеличить
Мао и. Ал.
Ученые из Университета Иоганна Кеплера (JKU) создали гибких управляемых роботов, способных бегать, плавать и прыгать с высокой скоростью. В ходе испытаний роботы достигли скорости 70 BL/s (длин тела в секунду). Эти результаты поразительны, потому что даже гепард (самое быстрое наземное животное на Земле) может развивать скорость только до 23 BL/s. Но не ждите абсолютных рекордов скорости, так как у роботов тела размером с миллиметр, хотя эти крошечные машины, вероятно, являются самыми быстрыми мягкими роботами на планете.
Программные роботы отличаются от обычных роботов, которых вы видите на фабриках, в ресторанах и на научных выставках. Они изготовлены из гибких материалов, таких как полимеры и сплавы с памятью формы (эти сплавы меняют форму при изменении температуры). Мягкие материалы позволяют роботам функционировать аналогично живому организму (или живой ткани). Напротив, обычные роботы сделаны из твердых материалов, таких как пластик, алюминий и металл.
В течение долгого времени ученые пытались создать гибких роботов, достаточно быстрых для работы в экстремальных условиях, где никакая другая машина не смогла бы. Такие роботы могут сыграть важную роль в медицине. Например, сверхбыстрые роботы могут заменить такие инвазивные методы, как колоноскопия. Врачи могут использовать быстрых гибких роботов для проверки любых аномалий в органах тела (например, в желудке), которые трудно исследовать с помощью обычных диагностических роботов.
Создавайте сверхбыстрых роботов
Сверхбыстрые роботы сделаны из жидкого металлического сплава под названием галинстан. Он состоит из олова (Sn), галлия (Ga) и индия (In). Галинстан обычно не используется для создания мягких роботов; в основном они изготавливаются из эластомеров на силиконовой основе. На вопрос о причине этого первый автор исследования и физик мягких веществ в JKU, доктор Гоюн Мао, сказал Ars Technica: «Самое важное свойство этого материала заключается в том, что он подобен жидкости при комнатной температуре, а также имеет высокая проводимость, что делает его полезным для создания гибких и деформируемых катушек».
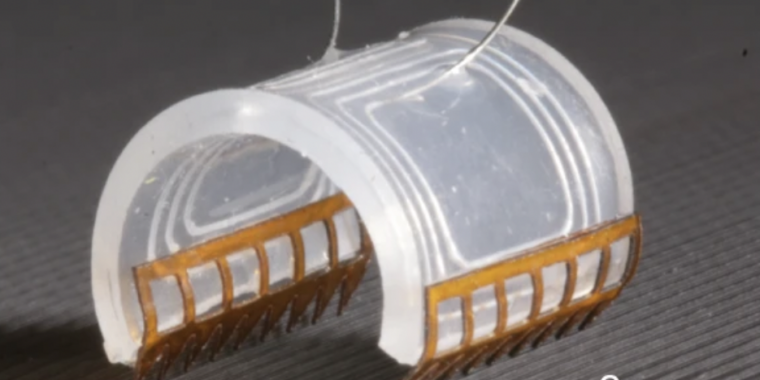
Исследователи использовали технологию 3D-печати жидким металлом, чтобы сформировать катушки галинстана. Эти напечатанные на 3D-принтере катушки были затем встроены в эластомерные оболочки, которые удерживают их вместе с приводом, который контролирует их состояние. Это создает гибкий робот в форме электромагнитной катушки (SEMR), способный обеспечить быстрое срабатывание и движение. Исследователи дополнительно оснащают роботов L-образными или зубчатыми ногами в зависимости от подложек, по которым они будут двигаться.
SEMR питаются от литий-полимерных батарей, а их сверхбыстрое движение обеспечивается электромагнитными приводами (компонентами, преобразующими электрическую энергию в механическую). Приводы являются магниточувствительными компонентами, поэтому быстрыми роботами можно легко управлять с помощью статического магнитного поля. В ходе испытаний привязанные роботы могли двигаться со скоростью 35 BL/с по плоскости и 70 BL/с по складчатой трехмерной поверхности. Кроме того, при тестировании в воде они плыли со скоростью 4,8 BL/s. «Мы считаем, что это новая и перспективная технология в области робототехники, которая имеет большой потенциал на будущее. Мы не нашли подобной технологии с использованием гибкого функционального материала, способного выполнять столько задач с такой высокой скоростью», — сказал Мао.
Будущее сверхбыстрых мягких роботов
Исследователи также провели тесты скорости с прототипами мягких роботов без привязи и достигли скорости плавания 1,8 длины тела в секунду (BL/s) и максимальной скорости бега 2,1 BL/s. Теперь исследователи планируют повысить эффективность и производительность беспроводной системы...
Ученые из Университета Иоганна Кеплера (JKU) создали гибких управляемых роботов, способных бегать, плавать и прыгать с высокой скоростью. В ходе испытаний роботы достигли скорости 70 BL/s (длин тела в секунду). Эти результаты поразительны, потому что даже гепард (самое быстрое наземное животное на Земле) может развивать скорость только до 23 BL/s. Но не ждите абсолютных рекордов скорости, так как у роботов тела размером с миллиметр, хотя эти крошечные машины, вероятно, являются самыми быстрыми мягкими роботами на планете.
Программные роботы отличаются от обычных роботов, которых вы видите на фабриках, в ресторанах и на научных выставках. Они изготовлены из гибких материалов, таких как полимеры и сплавы с памятью формы (эти сплавы меняют форму при изменении температуры). Мягкие материалы позволяют роботам функционировать аналогично живому организму (или живой ткани). Напротив, обычные роботы сделаны из твердых материалов, таких как пластик, алюминий и металл.
В течение долгого времени ученые пытались создать гибких роботов, достаточно быстрых для работы в экстремальных условиях, где никакая другая машина не смогла бы. Такие роботы могут сыграть важную роль в медицине. Например, сверхбыстрые роботы могут заменить такие инвазивные методы, как колоноскопия. Врачи могут использовать быстрых гибких роботов для проверки любых аномалий в органах тела (например, в желудке), которые трудно исследовать с помощью обычных диагностических роботов.
Создавайте сверхбыстрых роботов
Сверхбыстрые роботы сделаны из жидкого металлического сплава под названием галинстан. Он состоит из олова (Sn), галлия (Ga) и индия (In). Галинстан обычно не используется для создания мягких роботов; в основном они изготавливаются из эластомеров на силиконовой основе. На вопрос о причине этого первый автор исследования и физик мягких веществ в JKU, доктор Гоюн Мао, сказал Ars Technica: «Самое важное свойство этого материала заключается в том, что он подобен жидкости при комнатной температуре, а также имеет высокая проводимость, что делает его полезным для создания гибких и деформируемых катушек».
Исследователи использовали технологию 3D-печати жидким металлом, чтобы сформировать катушки галинстана. Эти напечатанные на 3D-принтере катушки были затем встроены в эластомерные оболочки, которые удерживают их вместе с приводом, который контролирует их состояние. Это создает гибкий робот в форме электромагнитной катушки (SEMR), способный обеспечить быстрое срабатывание и движение. Исследователи дополнительно оснащают роботов L-образными или зубчатыми ногами в зависимости от подложек, по которым они будут двигаться.
SEMR питаются от литий-полимерных батарей, а их сверхбыстрое движение обеспечивается электромагнитными приводами (компонентами, преобразующими электрическую энергию в механическую). Приводы являются магниточувствительными компонентами, поэтому быстрыми роботами можно легко управлять с помощью статического магнитного поля. В ходе испытаний привязанные роботы могли двигаться со скоростью 35 BL/с по плоскости и 70 BL/с по складчатой трехмерной поверхности. Кроме того, при тестировании в воде они плыли со скоростью 4,8 BL/s. «Мы считаем, что это новая и перспективная технология в области робототехники, которая имеет большой потенциал на будущее. Мы не нашли подобной технологии с использованием гибкого функционального материала, способного выполнять столько задач с такой высокой скоростью», — сказал Мао.
Будущее сверхбыстрых мягких роботов
Исследователи также провели тесты скорости с прототипами мягких роботов без привязи и достигли скорости плавания 1,8 длины тела в секунду (BL/s) и максимальной скорости бега 2,1 BL/s. Теперь исследователи планируют повысить эффективность и производительность беспроводной системы...
 Увеличить
Мао и. Ал.
Увеличить
Мао и. Ал.