شاهد اثنين من روبوتات Mini Cheetah وهما يخوضان المعركة في ملعب كرة القدم
تحتوي بعض تحديات الروبوتات على تطبيقات واضحة على الفور. يركز آخرون أكثر على مساعدة الأنظمة في حل المشكلات الأكبر. يقع تعليم الروبوتات الصغيرة على لعب كرة القدم ضد بعضها البعض بشكل مباشر في الفئة الأخيرة.
مؤلفو ورقة بحثية جديدة توضح بالتفصيل استخدام التعلم المعزز لتعليم روبوت Mini Cheetah التابع لمعهد ماساتشوستس للتكنولوجيا لعب دور حارس المرمى ،
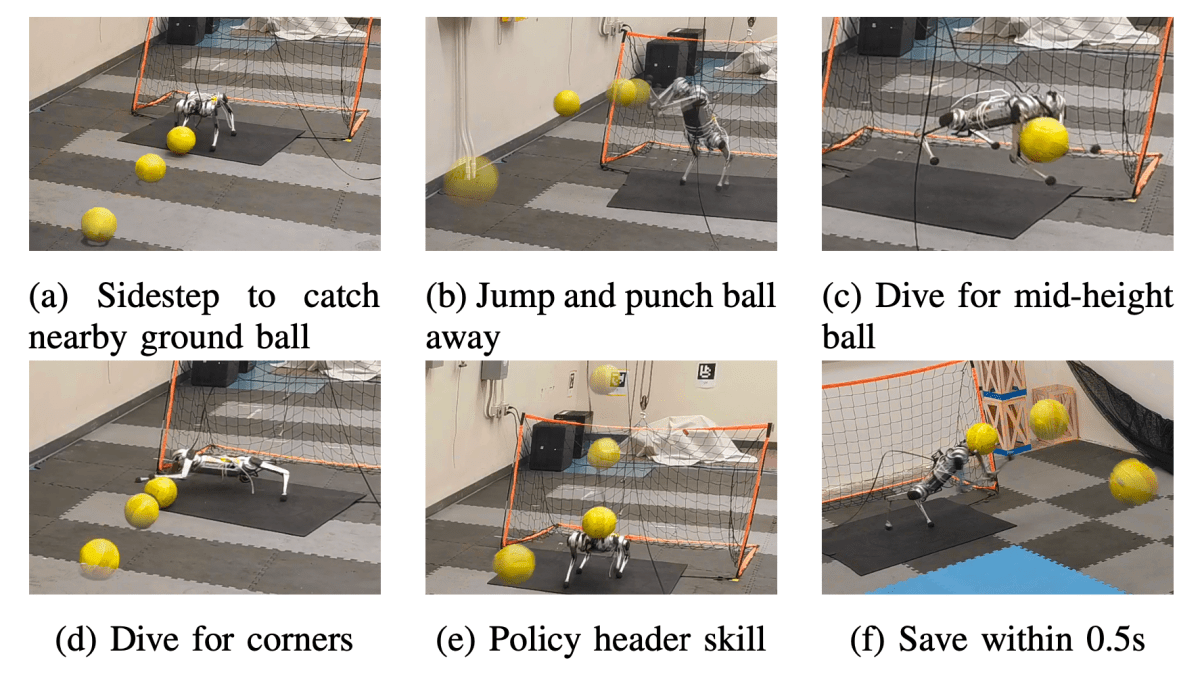
يعد حارس مرمى كرة القدم الذي يستخدم رباعي الأرجل مشكلة صعبة ، حيث تجمع بين الحركة الديناميكية العالية والتلاعب الدقيق والسريع بجسم غير قابل للإمساك (الكرة). يجب أن يتفاعل الروبوت ويعترض الكرة التي يحتمل أن تطير باستخدام مناورات الحركة الديناميكية في وقت قصير جدًا ، عادةً أقل من ثانية. في هذه المقالة ، نقترح حل هذه المشكلة باستخدام إطار عمل RL بدون نموذج هرمي.

اعتمادات الصورة: الروبوتات المختلطة
في الواقع ، يجب أن يقفل الروبوت بالقذيفة ويقوم بالمناورة لمنع الرصاصة في أقل من ثانية. يتم تعيين معلمات الروبوت في محاكي ، ويعتمد Mini Cheetah على ثلاثية من الحركات - المراوغة والغطس والقفز - لمنع الكرة في طريقها إلى المرمى عن طريق تحديد مسارها في الحركة.
لاختبار فعالية البرنامج ، وضع الفريق النظام في مواجهة كل من مكون بشري وفهد صغير آخر. والجدير بالذكر أن نفس الإطار الأساسي المستخدم في الدفاع عن الهدف يمكن تطبيقه في الهجوم. مؤلفو الورقة البحثية ، "في هذا العمل ، ركزنا فقط على مهمة حارس المرمى ، ولكن يمكن توسيع إطار العمل المقترح لسيناريوهات أخرى ، مثل المهارات المتعددة."
تحتوي بعض تحديات الروبوتات على تطبيقات واضحة على الفور. يركز آخرون أكثر على مساعدة الأنظمة في حل المشكلات الأكبر. يقع تعليم الروبوتات الصغيرة على لعب كرة القدم ضد بعضها البعض بشكل مباشر في الفئة الأخيرة.
مؤلفو ورقة بحثية جديدة توضح بالتفصيل استخدام التعلم المعزز لتعليم روبوت Mini Cheetah التابع لمعهد ماساتشوستس للتكنولوجيا لعب دور حارس المرمى ،
يعد حارس مرمى كرة القدم الذي يستخدم رباعي الأرجل مشكلة صعبة ، حيث تجمع بين الحركة الديناميكية العالية والتلاعب الدقيق والسريع بجسم غير قابل للإمساك (الكرة). يجب أن يتفاعل الروبوت ويعترض الكرة التي يحتمل أن تطير باستخدام مناورات الحركة الديناميكية في وقت قصير جدًا ، عادةً أقل من ثانية. في هذه المقالة ، نقترح حل هذه المشكلة باستخدام إطار عمل RL بدون نموذج هرمي.
اعتمادات الصورة: الروبوتات المختلطة
في الواقع ، يجب أن يقفل الروبوت بالقذيفة ويقوم بالمناورة لمنع الرصاصة في أقل من ثانية. يتم تعيين معلمات الروبوت في محاكي ، ويعتمد Mini Cheetah على ثلاثية من الحركات - المراوغة والغطس والقفز - لمنع الكرة في طريقها إلى المرمى عن طريق تحديد مسارها في الحركة.
لاختبار فعالية البرنامج ، وضع الفريق النظام في مواجهة كل من مكون بشري وفهد صغير آخر. والجدير بالذكر أن نفس الإطار الأساسي المستخدم في الدفاع عن الهدف يمكن تطبيقه في الهجوم. مؤلفو الورقة البحثية ، "في هذا العمل ، ركزنا فقط على مهمة حارس المرمى ، ولكن يمكن توسيع إطار العمل المقترح لسيناريوهات أخرى ، مثل المهارات المتعددة."
What's Your Reaction?





















