Muñeca de brazo robótico 3-DOF sin el peso del motor
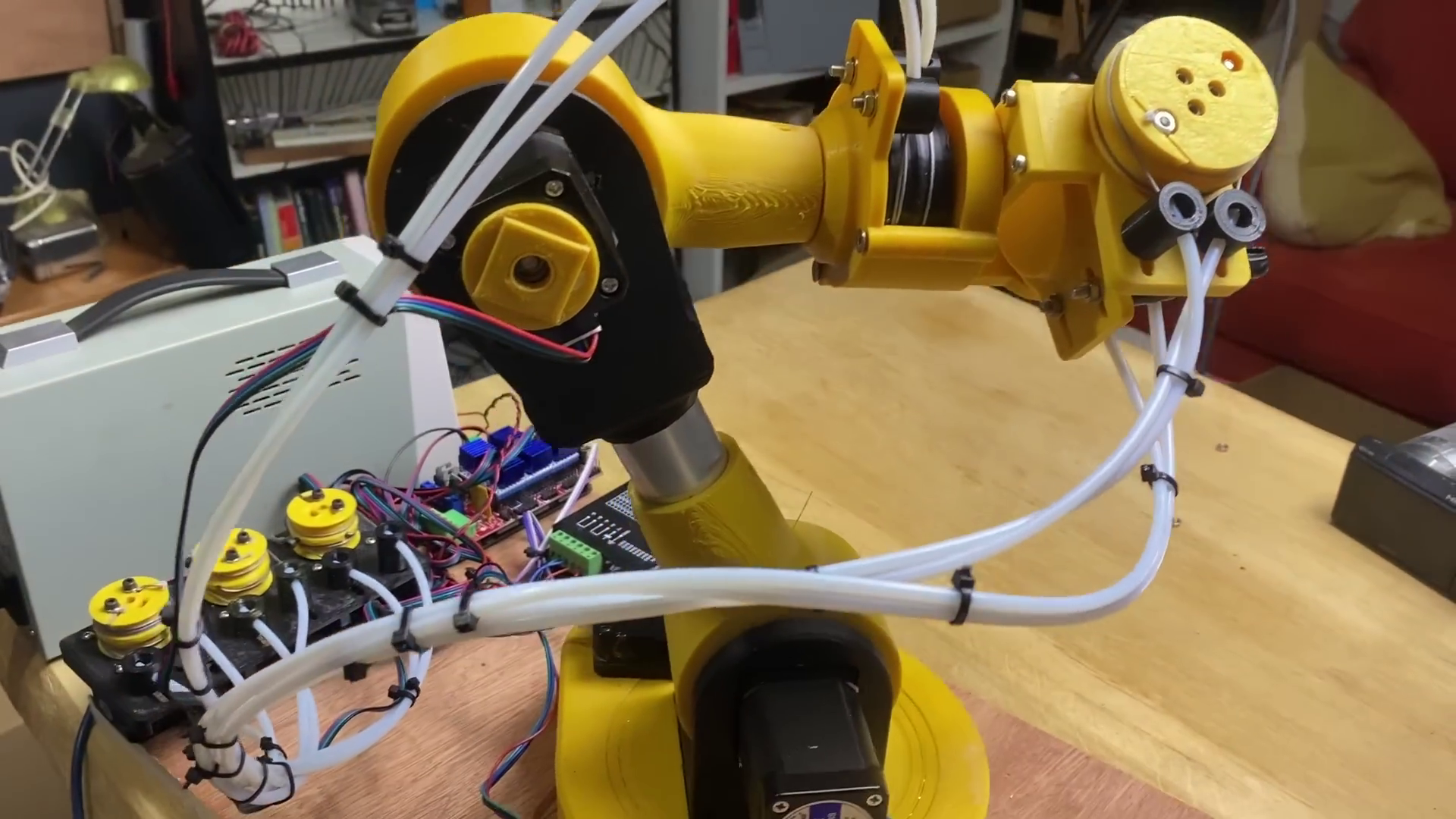
Un desafío importante con los brazos robóticos es el peso de los actuadores, especialmente cerca del final del brazo. El brazo de palanca largo significa que se requiere más torque de los otros actuadores, y todo se flexiona un poco más. Para solucionar este problema, [RoTechnic] eliminó por completo los motores paso a paso de muñeca de los brazos.
Construyó un mecanismo de empujar y tirar que utiliza hilo de pescar trenzado para transferir el movimiento a la muñeca del brazo robótico mediante tubos Bowden. Los motores están montados en la base del brazo, con un tambor y dos hilos de pescar en los ejes. Las líneas pasan por un tensor ajustable antes de entrar en los tubos Bowden. Este mecanismo de tambor también está presente en cada uno de los tres ejes de rotación de la muñeca.
[RoTechnic] usó una placa RAMPS alimentada por Arduino como controlador, que está programada para aceptar la interfaz serial. Creó una GUI simple y una interfaz de secuencias de comandos en Jupyter Labs para generar y enviar comandos, lo que parece una excelente solución para las pruebas.
Podemos ver que este mecanismo es útil para una variedad de aplicaciones de movimiento y, definitivamente, algo para agregar a la caja de herramientas de la idea. Se parece un poco a otras articulaciones operadas por cable que hemos visto en robots humanoides y otros brazos impresos en 3D.
Un desafío importante con los brazos robóticos es el peso de los actuadores, especialmente cerca del final del brazo. El brazo de palanca largo significa que se requiere más torque de los otros actuadores, y todo se flexiona un poco más. Para solucionar este problema, [RoTechnic] eliminó por completo los motores paso a paso de muñeca de los brazos.
Construyó un mecanismo de empujar y tirar que utiliza hilo de pescar trenzado para transferir el movimiento a la muñeca del brazo robótico mediante tubos Bowden. Los motores están montados en la base del brazo, con un tambor y dos hilos de pescar en los ejes. Las líneas pasan por un tensor ajustable antes de entrar en los tubos Bowden. Este mecanismo de tambor también está presente en cada uno de los tres ejes de rotación de la muñeca.
[RoTechnic] usó una placa RAMPS alimentada por Arduino como controlador, que está programada para aceptar la interfaz serial. Creó una GUI simple y una interfaz de secuencias de comandos en Jupyter Labs para generar y enviar comandos, lo que parece una excelente solución para las pruebas.
Podemos ver que este mecanismo es útil para una variedad de aplicaciones de movimiento y, definitivamente, algo para agregar a la caja de herramientas de la idea. Se parece un poco a otras articulaciones operadas por cable que hemos visto en robots humanoides y otros brazos impresos en 3D.
What's Your Reaction?