¿Pueden realmente caminar los robots trípodes?

Construir robots que caminan es difícil, ya que necesitan muchas piernas o cierta habilidad para equilibrarse al andar. Hay una razón por la que los robots fabricados por empresas como Boston Dynamics son tan asombrosos. Pero muchos aficionados han fabricado robots bípedos y cuadrúpedos, ignorando en gran medida los robots trípedos. Para saber si podían ser prácticos, James Bruton creó un prototipo de robot trípedo.
En comparación con un robot bípedo, un robot trípode es más estable cuando está parado. Pero un robot bípedo es más estable al caminar. Esto se debe a que puede mantener su centro de gravedad casi directamente sobre el pie que toca el suelo. Un robot tripulado, por otro lado, debe intentar equilibrarse sobre dos patas mientras mueve la tercera, mientras que el centro de gravedad está en algún lugar por encima del medio de un triángulo formado por los tres pies. Esto hace que los pasos para caminar sean difíciles de realizar.
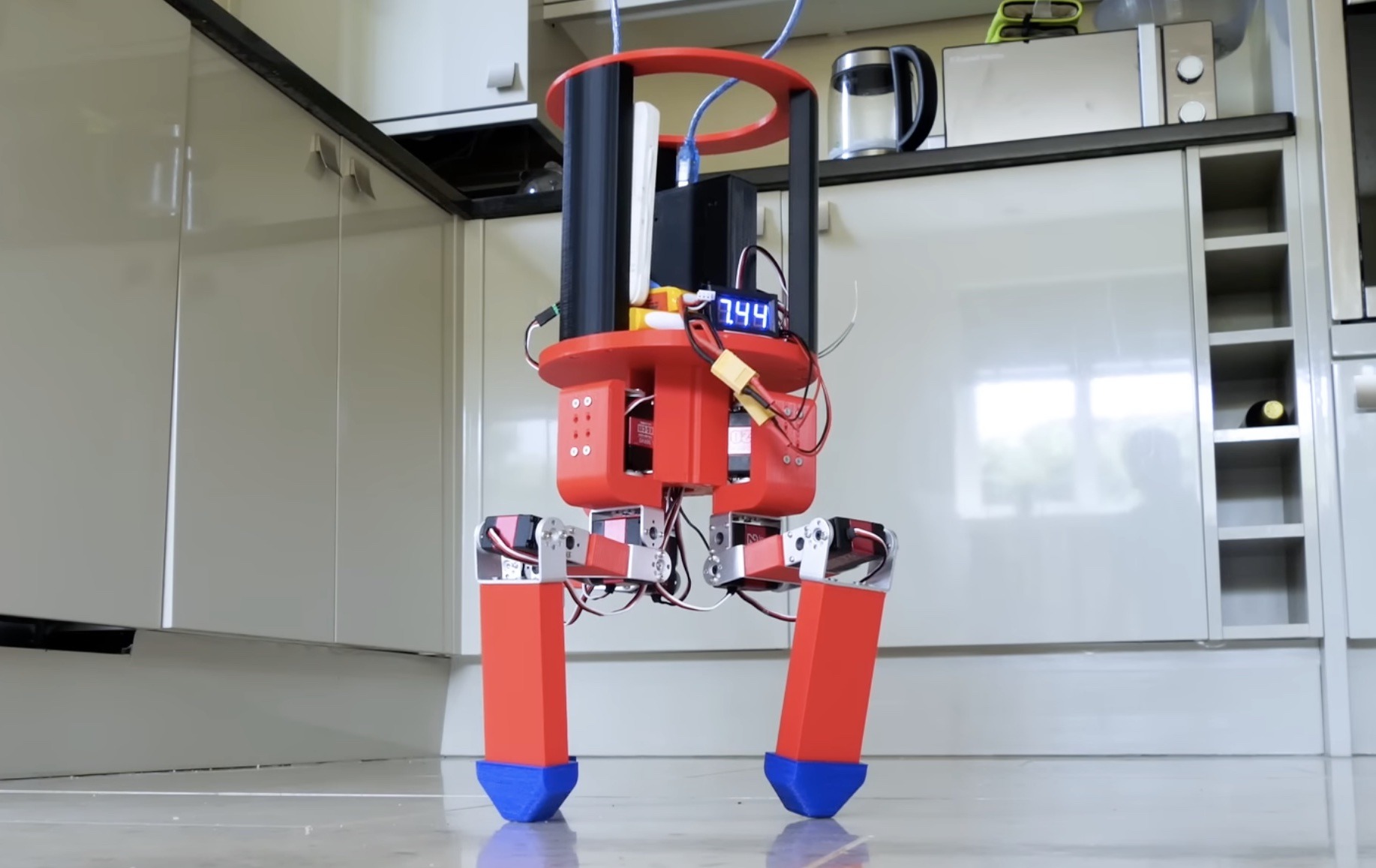
Bruton construyó este prototipo con un cuerpo impreso en 3D, patas servoaccionadas y un Arduino Mega 2560 para el control. Las tres patas están dispuestas con simetría radial y cada pata tiene tres articulaciones. Bruton intentó darle al robot un modo de andar en el que momentáneamente intentara equilibrarse sobre dos patas, mientras levantaba y balanceaba la tercera.
Pero era muy ineficiente y torpe. Bruton cree que podría obtener mejores resultados equipando al robot con una IMU. Esto le daría una sensación de equilibrio, lo que podría ayudarlo a mantenerse estable sobre dos piernas durante la marcha. Con un contrapeso, eso podría marcar una gran diferencia. Pero por ahora, Bruton está suspendiendo ese experimento.
Construir robots que caminan es difícil, ya que necesitan muchas piernas o cierta habilidad para equilibrarse al andar. Hay una razón por la que los robots fabricados por empresas como Boston Dynamics son tan asombrosos. Pero muchos aficionados han fabricado robots bípedos y cuadrúpedos, ignorando en gran medida los robots trípedos. Para saber si podían ser prácticos, James Bruton creó un prototipo de robot trípedo.
En comparación con un robot bípedo, un robot trípode es más estable cuando está parado. Pero un robot bípedo es más estable al caminar. Esto se debe a que puede mantener su centro de gravedad casi directamente sobre el pie que toca el suelo. Un robot tripulado, por otro lado, debe intentar equilibrarse sobre dos patas mientras mueve la tercera, mientras que el centro de gravedad está en algún lugar por encima del medio de un triángulo formado por los tres pies. Esto hace que los pasos para caminar sean difíciles de realizar.
Bruton construyó este prototipo con un cuerpo impreso en 3D, patas servoaccionadas y un Arduino Mega 2560 para el control. Las tres patas están dispuestas con simetría radial y cada pata tiene tres articulaciones. Bruton intentó darle al robot un modo de andar en el que momentáneamente intentara equilibrarse sobre dos patas, mientras levantaba y balanceaba la tercera.
Pero era muy ineficiente y torpe. Bruton cree que podría obtener mejores resultados equipando al robot con una IMU. Esto le daría una sensación de equilibrio, lo que podría ayudarlo a mantenerse estable sobre dos piernas durante la marcha. Con un contrapeso, eso podría marcar una gran diferencia. Pero por ahora, Bruton está suspendiendo ese experimento.
What's Your Reaction?