Posicionamiento centimétrico de cortacésped sin GPS RTK

GPS es ideal para navegar por carreteras, ya que no requiere mucha precisión. Pero el GPS solo tiene una precisión de varios metros, lo que significa que no es adecuado para aplicaciones que requieren un posicionamiento más preciso. Los sistemas GPS RTK (cinemática en tiempo real) pueden lograr una precisión mucho mayor, pero son complejos y requieren una suscripción a un servicio de corrección. Viktor Kurusa necesitaba un posicionamiento preciso para su cortacésped robótico, pero no quería depender del GPS RTK. En cambio, usó algunas placas Arduino para habilitar el rango UWB para el posicionamiento a escala centimétrica.
UWB (banda ultraancha) es una tecnología de radio que la FCC abrió para aplicaciones comerciales y de consumo en 2002. Es ideal para transmitir grandes cantidades de datos en distancias cortas. También es posible utilizar UWB para calcular distancias midiendo el ToF (tiempo de vuelo) entre un dispositivo de "etiqueta" y un dispositivo de "anclaje". Utilizando dos dispositivos de anclaje, la posición de la etiqueta se puede triangular en un plano 2D. Con tres anclas, se puede determinar la ubicación exacta de la baliza en el espacio 3D.

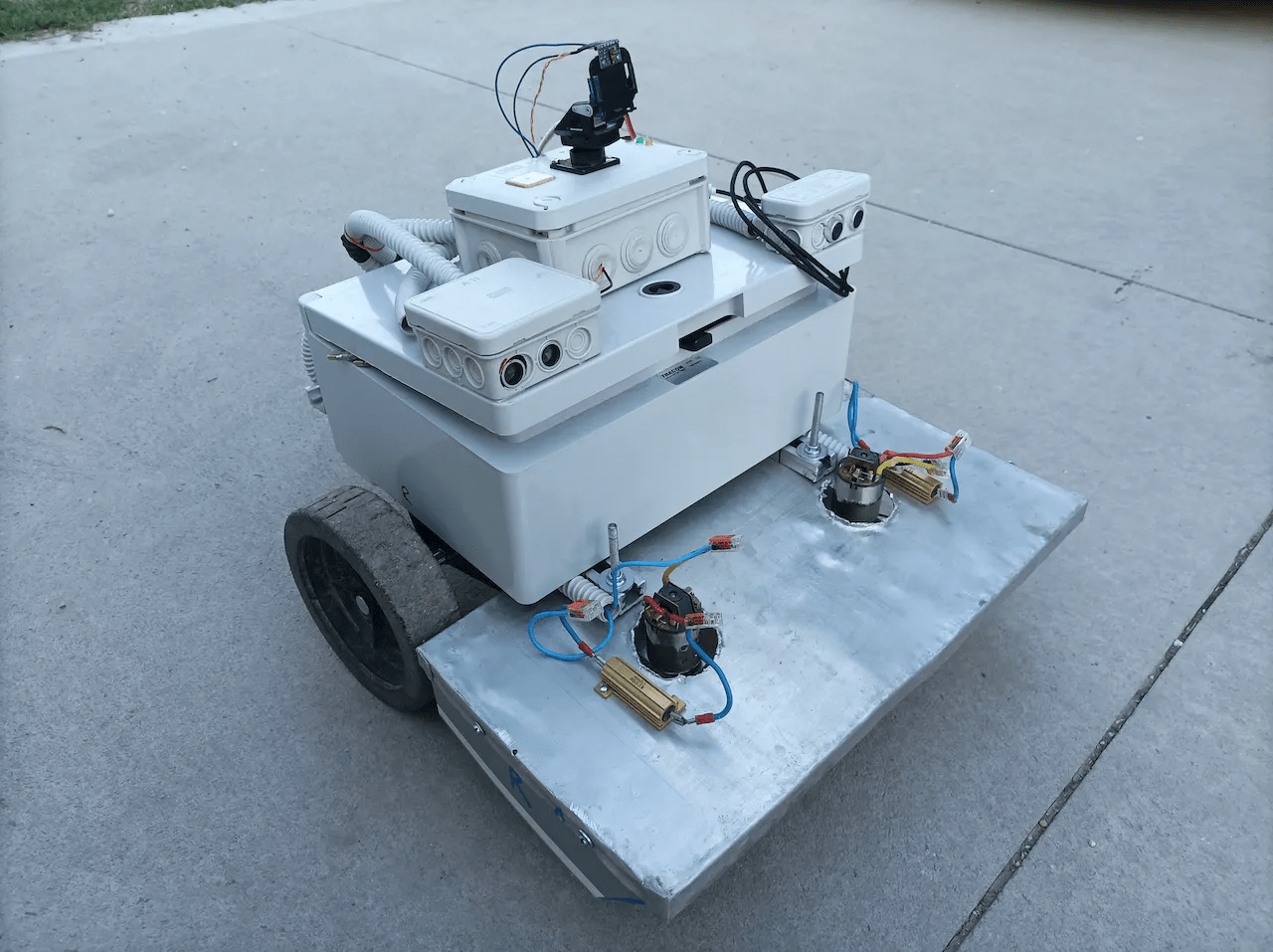
Kurusa usó esta capacidad de posicionamiento UWB para la navegación de su cortacésped robótico. El cortacésped integra varias placas: una Arduino Due, dos Nanos y cuatro SparkFun Arduino Pro Minis. Las últimas cuatro placas se conectan a los módulos transceptores Decawave DMW1000 UWB, tres de ellos para los anclajes remotos y uno para la etiqueta integrada. La placa Due actúa como el controlador integrado principal y ejecuta FreeRTOS, monitorea un acelerómetro MPU6050 y acciona los motores del robot a través de un puente H. Una placa Nano interactúa con sensores ultrasónicos para evitar obstáculos y la segunda Nano monitorea un sensor LIDAR, que el el sistema comprueba si los sensores ultrasónicos detectan un obstáculo.

Con todo este hardware funcionando en conjunto, Kurusa tiene una cortadora de césped robótica con un sofisticado conjunto de sensores. Sabe exactamente dónde se encuentra en el jardín, lo que le permite seguir caminos con precisión mientras corta el césped. Si algo inesperado se interpone en el camino del cortacésped, como el balón de fútbol de un niño, el cortacésped lo detectará e intentará esquivarlo.
GPS es ideal para navegar por carreteras, ya que no requiere mucha precisión. Pero el GPS solo tiene una precisión de varios metros, lo que significa que no es adecuado para aplicaciones que requieren un posicionamiento más preciso. Los sistemas GPS RTK (cinemática en tiempo real) pueden lograr una precisión mucho mayor, pero son complejos y requieren una suscripción a un servicio de corrección. Viktor Kurusa necesitaba un posicionamiento preciso para su cortacésped robótico, pero no quería depender del GPS RTK. En cambio, usó algunas placas Arduino para habilitar el rango UWB para el posicionamiento a escala centimétrica.
UWB (banda ultraancha) es una tecnología de radio que la FCC abrió para aplicaciones comerciales y de consumo en 2002. Es ideal para transmitir grandes cantidades de datos en distancias cortas. También es posible utilizar UWB para calcular distancias midiendo el ToF (tiempo de vuelo) entre un dispositivo de "etiqueta" y un dispositivo de "anclaje". Utilizando dos dispositivos de anclaje, la posición de la etiqueta se puede triangular en un plano 2D. Con tres anclas, se puede determinar la ubicación exacta de la baliza en el espacio 3D.
Kurusa usó esta capacidad de posicionamiento UWB para la navegación de su cortacésped robótico. El cortacésped integra varias placas: una Arduino Due, dos Nanos y cuatro SparkFun Arduino Pro Minis. Las últimas cuatro placas se conectan a los módulos transceptores Decawave DMW1000 UWB, tres de ellos para los anclajes remotos y uno para la etiqueta integrada. La placa Due actúa como el controlador integrado principal y ejecuta FreeRTOS, monitorea un acelerómetro MPU6050 y acciona los motores del robot a través de un puente H. Una placa Nano interactúa con sensores ultrasónicos para evitar obstáculos y la segunda Nano monitorea un sensor LIDAR, que el el sistema comprueba si los sensores ultrasónicos detectan un obstáculo.
Con todo este hardware funcionando en conjunto, Kurusa tiene una cortadora de césped robótica con un sofisticado conjunto de sensores. Sabe exactamente dónde se encuentra en el jardín, lo que le permite seguir caminos con precisión mientras corta el césped. Si algo inesperado se interpone en el camino del cortacésped, como el balón de fútbol de un niño, el cortacésped lo detectará e intentará esquivarlo.
What's Your Reaction?