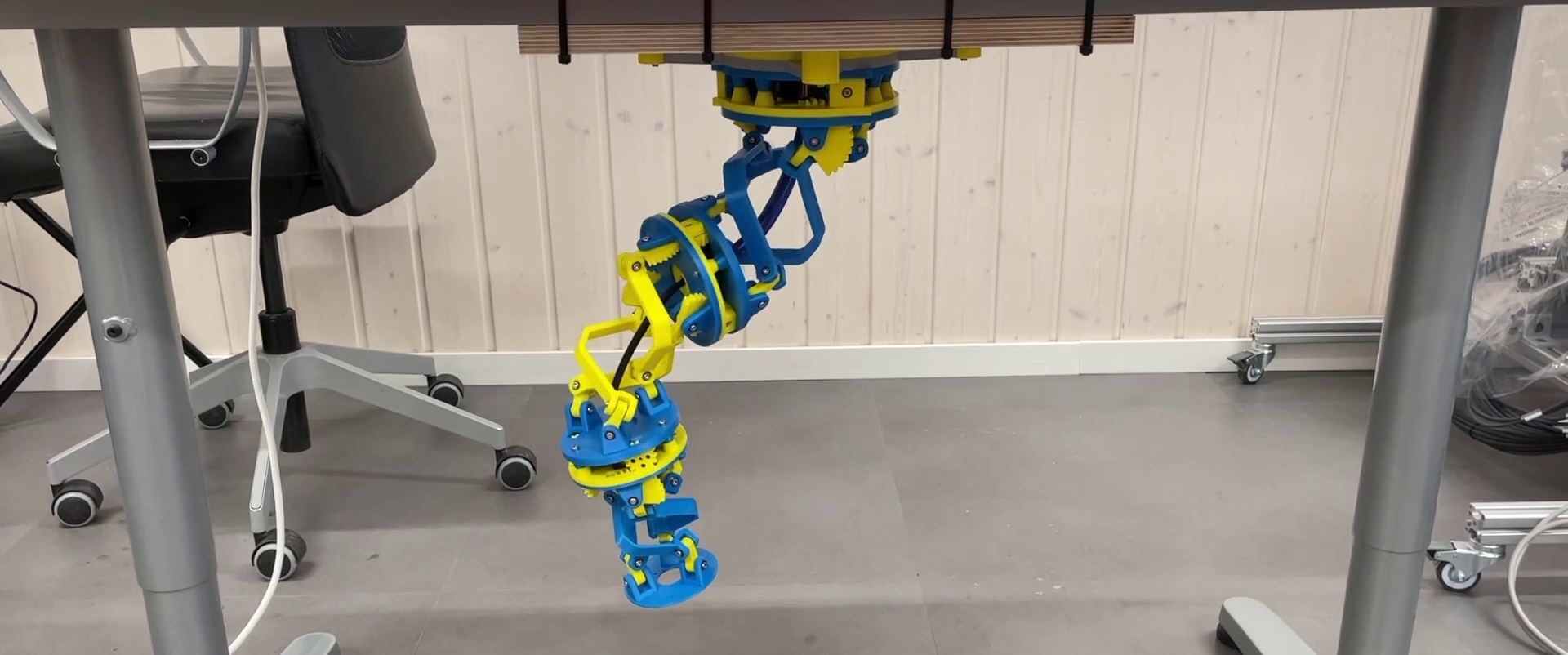
El brazo robótico Rolling Sphere se ve serpenteante
Las articulaciones de bisagra son generalmente las más fáciles de usar para aplicaciones robóticas, pero si desea un movimiento que se sienta más orgánico, vale la pena echarle un vistazo a los mecanismos de articulación rodante (o contacto rodante). [Skyentific] está experimentando con este mecanismo y ha construido un brazo robótico de 6 grados de libertad con él.
El mecanismo no necesita necesariamente superficies físicas para rodar unas sobre otras para funcionar, y puede lograr dos grados de libertad con el mecanismo de esfera rodante virtual. [Skyentific] muestra cómo funcionan tanto con recortes de cartón como con modelos impresos en 3D. Al apilar tres de estos mecanismos uno encima del otro, con cada etapa impulsada por tres servos Dynamixel, el movimiento se siente casi sinuoso.
Debido a que los servos impulsan los pequeños enlaces inferiores de cada etapa, funcionan con una desventaja mecánica significativa. El brazo apenas puede sostenerse sobre la mesa, por lo que [Skyentific] lo montó boca abajo en la parte inferior de la mesa para reducir la carga de su peso. Con el escenario delantero quitado, la carga se reduce considerablemente y no sufre tanto.
Una ventaja interesante de este mecanismo es que siempre hay un camino recto hacia el centro para el cableado. La longitud de esta línea entre las dos placas permanece igual en todo el rango de movimiento, por lo que también se puede usar para enrutar un eje de transmisión rígido. Esto es realmente lo que se hizo en el robot LIMS2-AMBIDEX para rotar su mano, y aquí también es donde vi este mecanismo por primera vez. Curiosamente, esta implementación no impulsó los enlaces en sí, sino que utilizó cables de tensión alrededor del mecanismo. También vemos esto en un robot tentáculo muy similar, por lo que esta podría ser una mejor opción.
Las articulaciones de bisagra son generalmente las más fáciles de usar para aplicaciones robóticas, pero si desea un movimiento que se sienta más orgánico, vale la pena echarle un vistazo a los mecanismos de articulación rodante (o contacto rodante). [Skyentific] está experimentando con este mecanismo y ha construido un brazo robótico de 6 grados de libertad con él.
El mecanismo no necesita necesariamente superficies físicas para rodar unas sobre otras para funcionar, y puede lograr dos grados de libertad con el mecanismo de esfera rodante virtual. [Skyentific] muestra cómo funcionan tanto con recortes de cartón como con modelos impresos en 3D. Al apilar tres de estos mecanismos uno encima del otro, con cada etapa impulsada por tres servos Dynamixel, el movimiento se siente casi sinuoso.
Debido a que los servos impulsan los pequeños enlaces inferiores de cada etapa, funcionan con una desventaja mecánica significativa. El brazo apenas puede sostenerse sobre la mesa, por lo que [Skyentific] lo montó boca abajo en la parte inferior de la mesa para reducir la carga de su peso. Con el escenario delantero quitado, la carga se reduce considerablemente y no sufre tanto.
Una ventaja interesante de este mecanismo es que siempre hay un camino recto hacia el centro para el cableado. La longitud de esta línea entre las dos placas permanece igual en todo el rango de movimiento, por lo que también se puede usar para enrutar un eje de transmisión rígido. Esto es realmente lo que se hizo en el robot LIMS2-AMBIDEX para rotar su mano, y aquí también es donde vi este mecanismo por primera vez. Curiosamente, esta implementación no impulsó los enlaces en sí, sino que utilizó cables de tensión alrededor del mecanismo. También vemos esto en un robot tentáculo muy similar, por lo que esta podría ser una mejor opción.
What's Your Reaction?