Эта новая система может научить робота простой домашней работе за 20 минут.
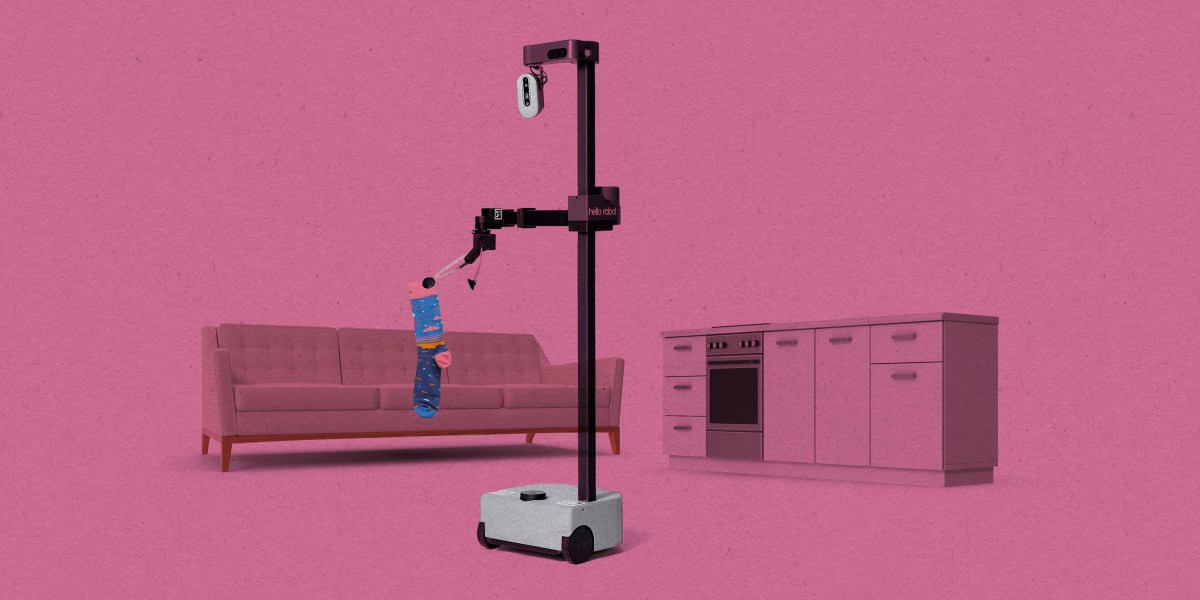
<р> А новый система что учил роботы А одомашненный пятно В вокруг 20 минуты мог помощь ТО поле из робототехника преодолеть А из Это самый большой проблемы: А недостаток из обучение данные. <р> ТО Открытый источник система, называется Добб-Э, был квалифицированный с использованием данные коллекция С настоящий дома. Он может помощь имеет учат А робот как имеет открыть А воздух фритюрница, закрывать А дверь, Или разобраться А подушка, среди другой Задания. <р> Пока другой типы из ИИ, такой как большой язык модели, являются квалифицированный на огромный репозитории из данные поцарапанный С ТО Интернет, ТО даже не мочь быть делать с роботы, потому что ТО данные потребности имеет быть физически собрано. Этот делает он А сюжет Сильнее имеет строить И лестница обучение база данных. <р> Таким же образом, пока Это относительно легкий имеет форма роботы имеет выполнять Задания внутри А лаборатория, эти условия не делай этого обязательно переводить имеет ТО неряшливый непредсказуемость из А настоящий Дом. <р> ИМЕЕТ драться эти проблемы, ТО команда пришел вверх с А простой, легко воспроизводимый путь имеет собирать ТО данные необходимый имеет форма Добб-Э: с помощью айфон прикрепил имеет А искатель палка, ТО добрый обычно использовал имеет брать вверх мусорное ведро. ТАК они вместе ТО айфон имеет сохранять видео из Что был что происходит. <р> Волонтёры В 22 дома В Новый Йорк завершенный определенный Задания с использованием ТО палка, включая открытие И закрытие двери И ящики, превращение огни на И неполноценный, И размещение ткани В ТО мусорное ведро. ТО айфоны лидар системы, движение датчики, И гироскопы были использовал имеет сохранять данные на движение, глубина, И ротация: значительная информация Когда он приходить имеет обучение А робот имеет воспроизводить ТО Действия на Это чистый. <р> После они бы имели коллекция только 13 часы' ценить из записи В общий, ТО команда использовал ТО данные имеет форма А ИИ модель имеет обучать А робот В как имеет нести вне ТО Действия. ТО модель использовал самоконтролируемый обучение методы, который учат нейронный сети имеет место узоры В данные наборы к сами себя, без быть гид к помеченный примеры. <р> ТО следующий этап подразумеваемый сочинение как надежно А коммерчески доступный робот называется Растягивающийся, который состоит из А колесный единица, А большой полюс, И А выдвижной рука, был способный имеет использовать ТО ИИ система имеет выполнять ТО Задания. А айфон задержан В А 3D-печать подняться был прикрепил имеет Растяжка рука имеет воспроизводить ТО средство на ТО палка. <р> ТО исследователи проверено ТО робот В десять дома В Новый Йорк на 30 дни, И он завершенный 109 семья Задания с А в целом успех ставка из 81%. Каждый пятно обычно взял Добб-Э вокруг 20 минуты имеет учиться: пять минуты из демонстрация С А человек с использованием ТО палка И прикрепил айфон, следовать за к 15 минуты из тонкая настройка, Когда ТО система по сравнению с Это предыдущий обучение с ТО новый демонстрация. <р> Один раз ТО тонкая настройка был полный, ТО робот был способный имеет полный простой Задания как налить С А чашка, открытие жалюзи И душ шторы, Или тянет настольная игра коробки С А полка. Он мог Также выполнять несколько Действия В быстрый Преемственность, такой как размещение А может В А переработка сумка И ТАК подъем ТО сумка. <р> Однако, нет каждый пятно был успешный. ТО система был смущенный к отражающий поверхность как зеркала. Также, потому что ТО роботы центр из сила тяжести Восток слабый, Задания что требовать тянет что-нибудь тяжелый имеет высота, как открытие холодильник двери, проверенный Также риск имеет пытаться. <р> ТО исследовать представленный заметный прогресс Для ТО Дом робототехника поле, сказал Чарли против. Кемп, соучредитель из ТО робототехника ферма Доброе утро Робот И А древний партнер учитель имеет Грузия Технологии. Хотя ТО Добб-Э команда использовал Доброе утро Роботы исследовать робот, Кемп был нет подразумеваемый В ТО проект. <р> "ТО будущее из Дом роботы Восток Действительно будущее. Это нет только немного безумный мечтать более," он сказал. «Масштабирование вверх данные имеет всегда был А испытание В робототехника, И Этот Восток А очень творческий, умный подход имеет что проблема." <р> ИМЕЕТ дата, Румба И другой робототехника пустой очистители являются ТО только настоящий коммерческий Дом робот успех, сказал Цзяцзюнь Ву, А помощник учитель из компьютер наука имеет Стэнфорд Университет ВОЗ был нет подразумеваемый В ТО исследовать. Их работа Восток Полегче потому что Румба не делай этого взаимодействовать с объекты - в делать, их цель Восток имеет избегать их. Это много более трудный имеет развивать Дом роботы способный из ДЕЛАТЬ А Шире диапазон из Задания, который Восток Что Этот исследовать мог помощь продвигать. <р> ТО Нью-Йоркский университет исследовать команда имеет делать все элементы из ТО проект открыть источник, И они есть надеясь другие воля скачать ТО закодированный И помощь...
<р>
А
новый
система
что
учил
роботы
А
одомашненный
пятно
В
вокруг
20
минуты
мог
помощь
ТО
поле
из
робототехника
преодолеть
А
из
Это
самый большой
проблемы:
А
недостаток
из
обучение
данные.
<р>
ТО
Открытый источник
система,
называется
Добб-Э,
был
квалифицированный
с использованием
данные
коллекция
С
настоящий
дома.
Он
может
помощь
имеет
учат
А
робот
как
имеет
открыть
А
воздух
фритюрница,
закрывать
А
дверь,
Или
разобраться
А
подушка,
среди
другой
Задания.
<р>
Пока
другой
типы
из
ИИ,
такой
как
большой
язык
модели,
являются
квалифицированный
на
огромный
репозитории
из
данные
поцарапанный
С
ТО
Интернет,
ТО
даже
не мочь
быть
делать
с
роботы,
потому что
ТО
данные
потребности
имеет
быть
физически
собрано.
Этот
делает
он
А
сюжет
Сильнее
имеет
строить
И
лестница
обучение
база данных.
<р>
Таким же образом,
пока
Это
относительно
легкий
имеет
форма
роботы
имеет
выполнять
Задания
внутри
А
лаборатория,
эти
условия
не делай этого
обязательно
переводить
имеет
ТО
неряшливый
непредсказуемость
из
А
настоящий
Дом.
<р>
ИМЕЕТ
драться
эти
проблемы,
ТО
команда
пришел
вверх
с
А
простой,
легко
воспроизводимый
путь
имеет
собирать
ТО
данные
необходимый
имеет
форма
Добб-Э: с помощью
айфон
прикрепил
имеет
А
искатель
палка,
ТО
добрый
обычно
использовал
имеет
брать
вверх
мусорное ведро.
ТАК
они
вместе
ТО
айфон
имеет
сохранять
видео
из
Что
был
что происходит.
<р>
Волонтёры
В
22
дома
В
Новый
Йорк
завершенный
определенный
Задания
с использованием
ТО
палка,
включая
открытие
И
закрытие
двери
И
ящики,
превращение
огни
на
И
неполноценный,
И
размещение
ткани
В
ТО
мусорное ведро.
ТО
айфоны
лидар
системы,
движение
датчики,
И
гироскопы
были
использовал
имеет
сохранять
данные
на
движение,
глубина,
И
ротация: значительная
информация
Когда
он
приходить
имеет
обучение
А
робот
имеет
воспроизводить
ТО
Действия
на
Это
чистый.
<р>
После
они бы имели
коллекция
только
13
часы'
ценить
из
записи
В
общий,
ТО
команда
использовал
ТО
данные
имеет
форма
А
ИИ
модель
имеет
обучать
А
робот
В
как
имеет
нести
вне
ТО
Действия.
ТО
модель
использовал
самоконтролируемый
обучение
методы,
который
учат
нейронный
сети
имеет
место
узоры
В
данные
наборы
к
сами себя,
без
быть
гид
к
помеченный
примеры.
<р>
ТО
следующий
этап
подразумеваемый
сочинение
как
надежно
А
коммерчески
доступный
робот
называется
Растягивающийся,
который
состоит
из
А
колесный
единица,
А
большой
полюс,
И
А
выдвижной
рука,
был
способный
имеет
использовать
ТО
ИИ
система
имеет
выполнять
ТО
Задания.
А
айфон
задержан
В
А
3D-печать
подняться
был
прикрепил
имеет
Растяжка
рука
имеет
воспроизводить
ТО
средство
на
ТО
палка.
<р>
ТО
исследователи
проверено
ТО
робот
В
десять
дома
В
Новый
Йорк
на
30
дни,
И
он
завершенный
109
семья
Задания
с
А
в целом
успех
ставка
из
81%.
Каждый
пятно
обычно
взял
Добб-Э
вокруг
20
минуты
имеет
учиться:
пять
минуты
из
демонстрация
С
А
человек
с использованием
ТО
палка
И
прикрепил
айфон,
следовать за
к
15
минуты
из
тонкая настройка,
Когда
ТО
система
по сравнению с
Это
предыдущий
обучение
с
ТО
новый
демонстрация.
<р>
Один раз
ТО
тонкая настройка
был
полный,
ТО
робот
был
способный
имеет
полный
простой
Задания
как
налить
С
А
чашка,
открытие
жалюзи
И
душ
шторы,
Или
тянет
настольная игра
коробки
С
А
полка.
Он
мог
Также
выполнять
несколько
Действия
В
быстрый
Преемственность,
такой
как
размещение
А
может
В
А
переработка
сумка
И
ТАК
подъем
ТО
сумка.
<р>
Однако,
нет
каждый
пятно
был
успешный.
ТО
система
был
смущенный
к
отражающий
поверхность
как
зеркала.
Также,
потому что
ТО
роботы
центр
из
сила тяжести
Восток
слабый,
Задания
что
требовать
тянет
что-нибудь
тяжелый
имеет
высота,
как
открытие
холодильник
двери,
проверенный
Также
риск
имеет
пытаться.
<р>
ТО
исследовать
представленный
заметный
прогресс
Для
ТО
Дом
робототехника
поле,
сказал
Чарли
против.
Кемп,
соучредитель
из
ТО
робототехника
ферма
Доброе утро
Робот
И
А
древний
партнер
учитель
имеет
Грузия
Технологии.
Хотя
ТО
Добб-Э
команда
использовал
Доброе утро
Роботы
исследовать
робот,
Кемп
был
нет
подразумеваемый
В
ТО
проект.
<р>
"ТО
будущее
из
Дом
роботы
Восток
Действительно
будущее.
Это
нет
только
немного
безумный
мечтать
более,"
он
сказал.
«Масштабирование
вверх
данные
имеет
всегда
был
А
испытание
В
робототехника,
И
Этот
Восток
А
очень
творческий,
умный
подход
имеет
что
проблема."
<р>
ИМЕЕТ
дата,
Румба
И
другой
робототехника
пустой
очистители
являются
ТО
только
настоящий
коммерческий
Дом
робот
успех,
сказал
Цзяцзюнь
Ву,
А
помощник
учитель
из
компьютер
наука
имеет
Стэнфорд
Университет
ВОЗ
был
нет
подразумеваемый
В
ТО
исследовать.
Их
работа
Восток
Полегче
потому что
Румба
не делай этого
взаимодействовать
с
объекты - в
делать,
их
цель
Восток
имеет
избегать
их.
Это
много
более
трудный
имеет
развивать
Дом
роботы
способный
из
ДЕЛАТЬ
А
Шире
диапазон
из
Задания,
который
Восток
Что
Этот
исследовать
мог
помощь
продвигать.
<р>
ТО
Нью-Йоркский университет
исследовать
команда
имеет
делать
все
элементы
из
ТО
проект
открыть
источник,
И
они есть
надеясь
другие
воля
скачать
ТО
закодированный
И
помощь...
What's Your Reaction?



















