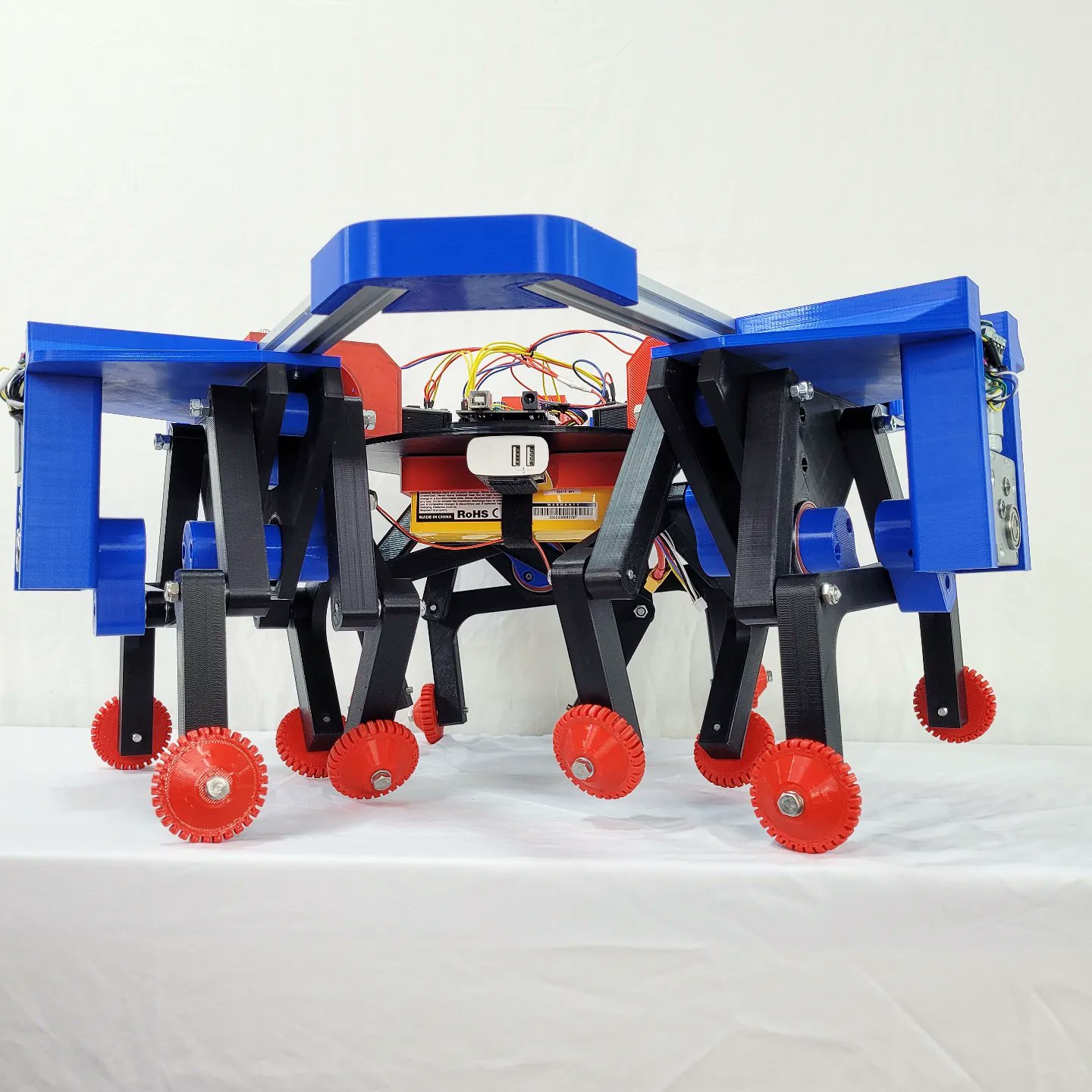
Esta máquina para caminar puede moverse en cualquier dirección.

Los vehículos con ruedas son tan comunes porque son eficientes. Si un vehículo circula sobre una superficie nivelada y relativamente lisa, las ruedas son la opción más eficiente. Pero en terrenos irregulares, las ruedas no siempre son suficientes. Para tales terrenos, las orugas de los tanques y las opciones más exóticas a menudo funcionan mejor que las ruedas. Las máquinas para caminar llevan esto al extremo, trepando por terrenos accidentados de la misma manera que lo hacen los animales. Pero las máquinas para caminar tradicionales luchan por girar en su lugar sin usar muchos motores. Para superar esta limitación, James Bruton se inspiró en las ruedas omnidireccionales para construir un robot capaz de moverse en cualquier dirección.
Bruton utiliza ruedas omnidireccionales en muchos de sus proyectos. Las ruedas Omni tienen rodillos alrededor de su circunferencia, lo que les permite rodar pasivamente en una dirección y activamente en otra. Un vehículo equipado con cuatro ruedas omnidireccionales puede moverse en cualquier dirección girando las ruedas individuales en direcciones opuestas. Este robot andante utiliza un concepto similar. En la dirección activa de cada mecanismo, avanza. Pero las patas tienen ruedas que giran libremente, lo que permite que cada mecanismo ruede pasivamente hacia cualquier lado. El robot tiene tres de estos mecanismos para caminar en un patrón triangular, por lo que puede moverse en cualquier dirección controlando qué mecanismos están activos y cuáles están pasivos en un momento dado.
Cada mecanismo para caminar tiene un solo motor de accionamiento (un motor de CC con una caja de cambios) que puede girar hacia adelante o hacia atrás. Bruton controla la velocidad y la dirección de estos motores con una placa Arduino Mega 2560 a través de módulos de controlador BTS7960. El Arduino recibe comandos del control remoto personalizado de Bruton a través de un módulo transceptor de radio. Casi todas las piezas mecánicas del robot se imprimieron en 3D, excepto algunas extrusiones de aluminio y sujetadores.
Sobre alfombras lisas, el robot funciona muy bien. También puede cruzar pequeños obstáculos, aunque no escalará ninguna montaña. Pero demostró el concepto, y Bruton planea construir una versión enorme de este robot en el que pueda montar.
Los vehículos con ruedas son tan comunes porque son eficientes. Si un vehículo circula sobre una superficie nivelada y relativamente lisa, las ruedas son la opción más eficiente. Pero en terrenos irregulares, las ruedas no siempre son suficientes. Para tales terrenos, las orugas de los tanques y las opciones más exóticas a menudo funcionan mejor que las ruedas. Las máquinas para caminar llevan esto al extremo, trepando por terrenos accidentados de la misma manera que lo hacen los animales. Pero las máquinas para caminar tradicionales luchan por girar en su lugar sin usar muchos motores. Para superar esta limitación, James Bruton se inspiró en las ruedas omnidireccionales para construir un robot capaz de moverse en cualquier dirección.
Bruton utiliza ruedas omnidireccionales en muchos de sus proyectos. Las ruedas Omni tienen rodillos alrededor de su circunferencia, lo que les permite rodar pasivamente en una dirección y activamente en otra. Un vehículo equipado con cuatro ruedas omnidireccionales puede moverse en cualquier dirección girando las ruedas individuales en direcciones opuestas. Este robot andante utiliza un concepto similar. En la dirección activa de cada mecanismo, avanza. Pero las patas tienen ruedas que giran libremente, lo que permite que cada mecanismo ruede pasivamente hacia cualquier lado. El robot tiene tres de estos mecanismos para caminar en un patrón triangular, por lo que puede moverse en cualquier dirección controlando qué mecanismos están activos y cuáles están pasivos en un momento dado.
Cada mecanismo para caminar tiene un solo motor de accionamiento (un motor de CC con una caja de cambios) que puede girar hacia adelante o hacia atrás. Bruton controla la velocidad y la dirección de estos motores con una placa Arduino Mega 2560 a través de módulos de controlador BTS7960. El Arduino recibe comandos del control remoto personalizado de Bruton a través de un módulo transceptor de radio. Casi todas las piezas mecánicas del robot se imprimieron en 3D, excepto algunas extrusiones de aluminio y sujetadores.
Sobre alfombras lisas, el robot funciona muy bien. También puede cruzar pequeños obstáculos, aunque no escalará ninguna montaña. Pero demostró el concepto, y Bruton planea construir una versión enorme de este robot en el que pueda montar.
What's Your Reaction?