Самобалансуючий робот, надрукований на 3D-принтері, втілює в життя теорію управління
Стабілізація перевернутого маятника є класичною проблемою теорії керування, і якщо ви коли-небудь читали курс із систем керування, можливо, ви пам’ятаєте, що бачили сторінки, наповнені диференціальними рівняннями та діаграмами Боде лише для опису його основної роботи. Хоча це може зробити таку систему надзвичайно складною, впровадження всієї цієї теорії зовсім не повинно бути складним, як [Limenitis Reducta] демонструє у своєму останньому проекті. Все, що вам потрібно, це 3D-принтер, базові навички роботи з електронікою та знання Python.
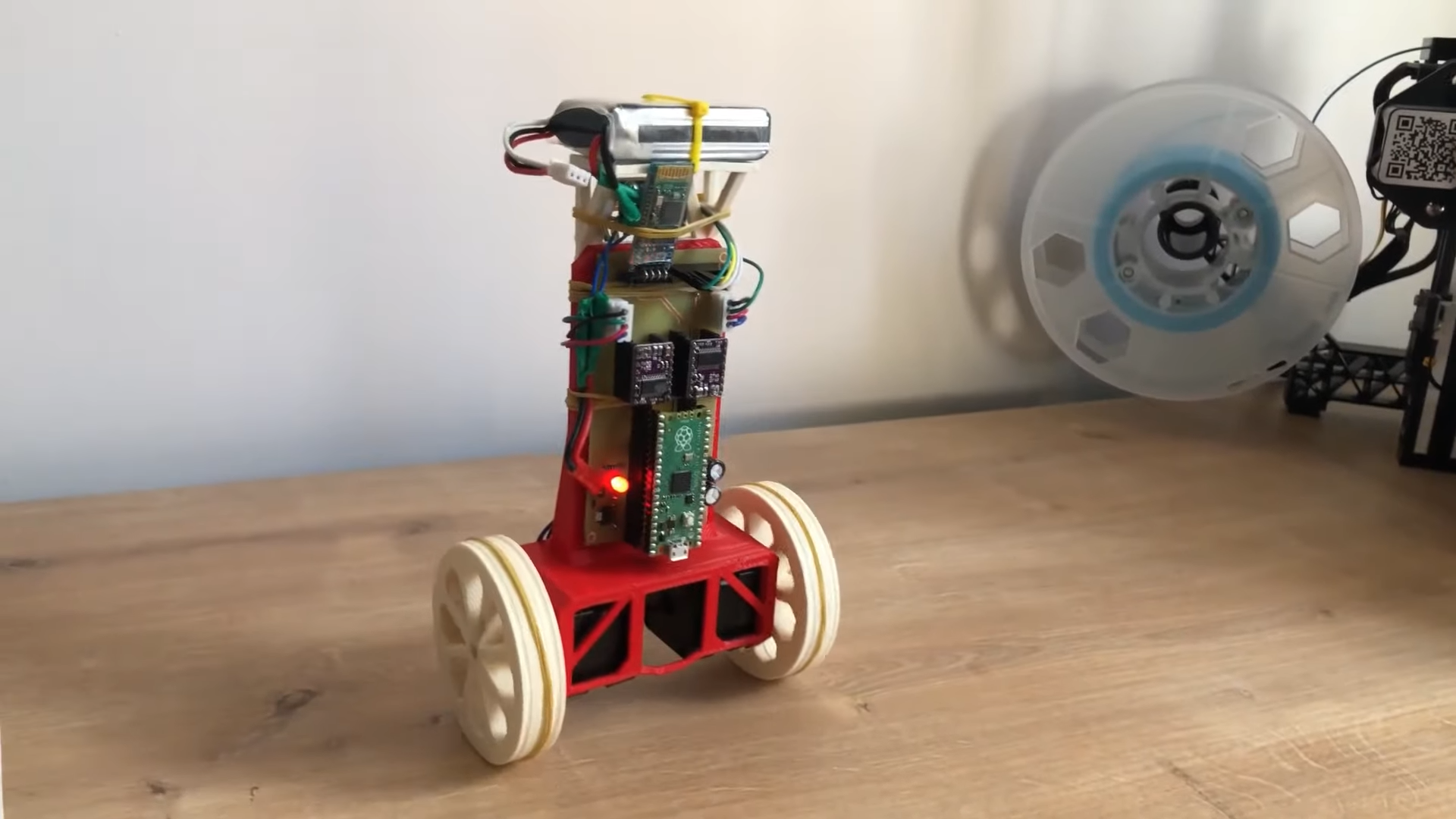
Потрібними компонентами є корпус, два колеса, двигуни для приводу цих коліс і електроніка. [Ліменітіс] демонструє процес проектування у відео нижче (турецькою мовою з англійськими субтитрами), де він малює всю систему у Fusion 360, а потім починає її виготовляти. Кузов і колеса надруковані на 3D-принтері, а гумові стрічки забезпечують певне зчеплення з колесами, які інакше б погано рухалися на слизькій поверхні.
 Монтажна плата складається лише з кількох компонентів, і більшу частину складності виконують модулі, що підключаються.
Монтажна плата складається лише з кількох компонентів, і більшу частину складності виконують модулі, що підключаються.Два крокові двигуни приводять в рух колеса, керовані драйвером двигуна DRV8825, а також акселерометр і гіроскоп MPU-9250. вимірює кут і прискорення системи. Цикл замикає Raspberry Pi Pico, який реалізує ПІД-регулятор: ще одну класику теорії керування, у якій пропорційні, інтегральні та похідні параметри налаштовані на адаптацію контуру керування до відповідної фізичної системи. Зовнішні вхідні дані можна надавати через з’єднання Bluetooth, що дає змогу керувати роботом із комп’ютера чи смартфона та керувати ним у вашій вітальні.
Усі файли дизайну та програмне забезпечення доступні на сторінці [Limenitis] GitHub і є чудовою відправною точкою, якщо ви хочете попрактикуватися в цій теорії керування. Самобалансуючі роботи є фаворитами робототехнічних хакерів. Тож прикладів не бракує, якщо вам знадобиться більше натхнення, перш ніж створювати власний: ви можете створити їх зі стандартних деталей, шматочків дерева чи навіть робота без зварювання. макетна плата.
Стабілізація перевернутого маятника є класичною проблемою теорії керування, і якщо ви коли-небудь читали курс із систем керування, можливо, ви пам’ятаєте, що бачили сторінки, наповнені диференціальними рівняннями та діаграмами Боде лише для опису його основної роботи. Хоча це може зробити таку систему надзвичайно складною, впровадження всієї цієї теорії зовсім не повинно бути складним, як [Limenitis Reducta] демонструє у своєму останньому проекті. Все, що вам потрібно, це 3D-принтер, базові навички роботи з електронікою та знання Python.
Потрібними компонентами є корпус, два колеса, двигуни для приводу цих коліс і електроніка. [Ліменітіс] демонструє процес проектування у відео нижче (турецькою мовою з англійськими субтитрами), де він малює всю систему у Fusion 360, а потім починає її виготовляти. Кузов і колеса надруковані на 3D-принтері, а гумові стрічки забезпечують певне зчеплення з колесами, які інакше б погано рухалися на слизькій поверхні.
Монтажна плата складається лише з кількох компонентів, і більшу частину складності виконують модулі, що підключаються.Два крокові двигуни приводять в рух колеса, керовані драйвером двигуна DRV8825, а також акселерометр і гіроскоп MPU-9250. вимірює кут і прискорення системи. Цикл замикає Raspberry Pi Pico, який реалізує ПІД-регулятор: ще одну класику теорії керування, у якій пропорційні, інтегральні та похідні параметри налаштовані на адаптацію контуру керування до відповідної фізичної системи. Зовнішні вхідні дані можна надавати через з’єднання Bluetooth, що дає змогу керувати роботом із комп’ютера чи смартфона та керувати ним у вашій вітальні.
Усі файли дизайну та програмне забезпечення доступні на сторінці [Limenitis] GitHub і є чудовою відправною точкою, якщо ви хочете попрактикуватися в цій теорії керування. Самобалансуючі роботи є фаворитами робототехнічних хакерів. Тож прикладів не бракує, якщо вам знадобиться більше натхнення, перш ніж створювати власний: ви можете створити їх зі стандартних деталей, шматочків дерева чи навіть робота без зварювання. макетна плата.
What's Your Reaction?




















