Real Robot One — це високоефективна роботизована рука, яку ви можете створити самостійно
Real Robot One — це високоефективна роботизована рука, яку ви можете створити самостійно
Команда Arduino — 15 серпня 2022 р.

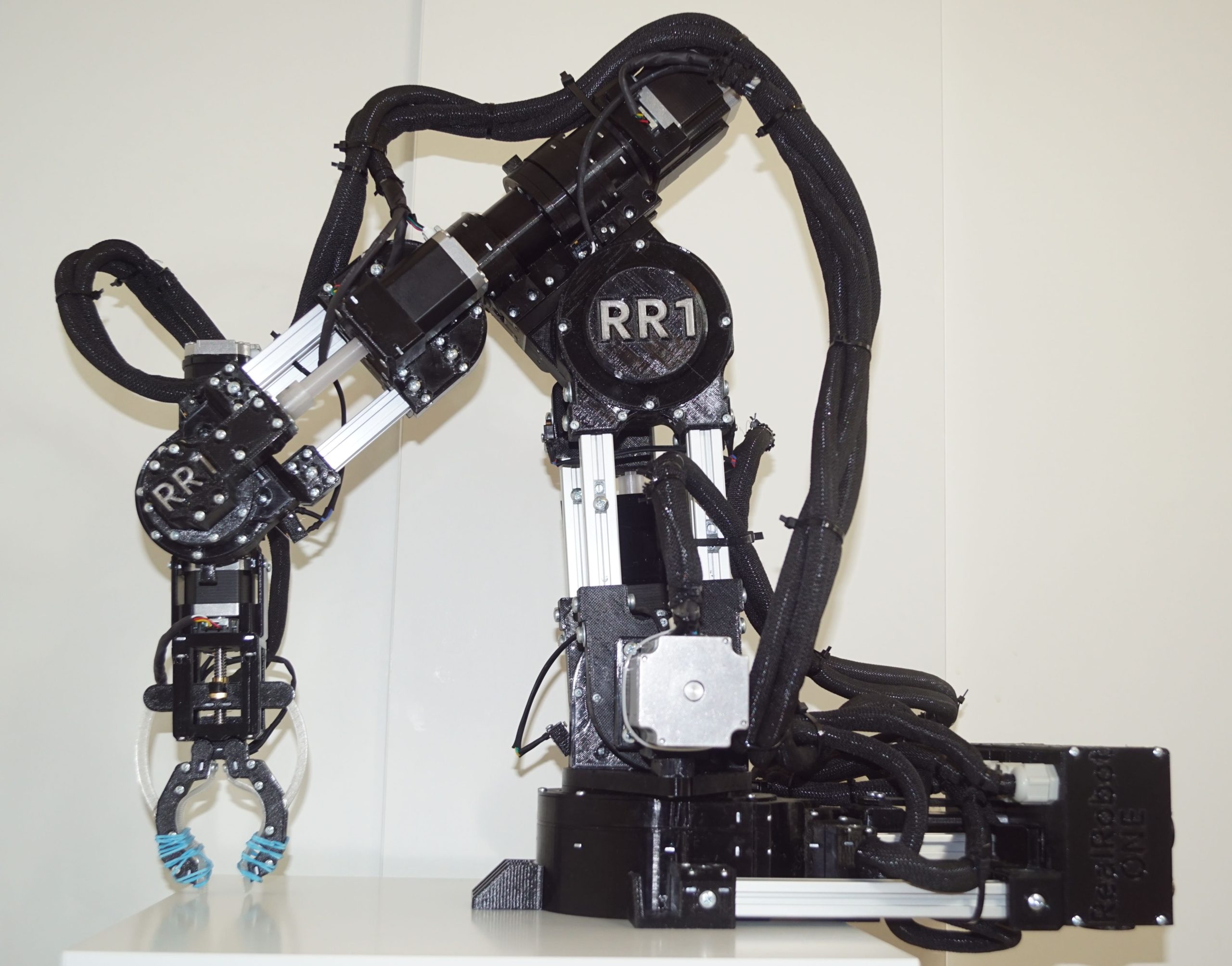
Роботи — це універсальні машини, які чудово підходять для вивчення принципів робототехніки або навіть для виконання корисної роботи як любителя. Ця робота може складатися з вибору та розміщення компонентів на друкованих платах, пакувальних коробках або будь-якому іншому елементі, який можна уявити. Але щоб добре виконувати цю роботу, роботизованій руці потрібно більше матеріалів, ніж те, що ми зазвичай бачимо в проектах DIY. Павло Суринек хотів створити високоефективну роботизовану руку, і результатом став RR1: Real Robot One, який має замкнутий зворотний зв’язок для точності та повторюваності.
У роботизованій системі з відкритим контуром контролер лише видає команди позиціонування й не отримує зворотного зв’язку. Оскільки він не має зворотного зв’язку, контролер не знає, чи точне положення, і не може активно компенсувати такі проблеми, як люфт у двигунах. Зворотний зв’язок із замкнутим контуром надає контролеру дані про позицію в реальному часі, тому він може забезпечити відповідність результатів командам. RR1 отримує дані зворотного зв’язку із замкнутим контуром від датчиків на кожному з шести шарнірів, які приводяться в рух кроковими двигунами через планетарні редуктори, надруковані на 3D.

Плата Arduino Due керує кроковими двигунами через плати драйверів і контролює кодери. Він передає дані з кодера на комп’ютер під назвою RB1: Real Box One і отримує у відповідь команди керування. Продемонстрований кінцевий ефектор — це стандартний затискач, а решта рукоятки — це комбінація 3D-друкованих деталей і екструзії алюмінію. Поточна версія RR1 має максимальний радіус дії 80 см і може піднімати близько 2 кг. Це вже вражає, але Суринек планує покращити його за допомогою майбутнього перегляду.
Команда Arduino — 15 серпня 2022 р.
Роботи — це універсальні машини, які чудово підходять для вивчення принципів робототехніки або навіть для виконання корисної роботи як любителя. Ця робота може складатися з вибору та розміщення компонентів на друкованих платах, пакувальних коробках або будь-якому іншому елементі, який можна уявити. Але щоб добре виконувати цю роботу, роботизованій руці потрібно більше матеріалів, ніж те, що ми зазвичай бачимо в проектах DIY. Павло Суринек хотів створити високоефективну роботизовану руку, і результатом став RR1: Real Robot One, який має замкнутий зворотний зв’язок для точності та повторюваності.
У роботизованій системі з відкритим контуром контролер лише видає команди позиціонування й не отримує зворотного зв’язку. Оскільки він не має зворотного зв’язку, контролер не знає, чи точне положення, і не може активно компенсувати такі проблеми, як люфт у двигунах. Зворотний зв’язок із замкнутим контуром надає контролеру дані про позицію в реальному часі, тому він може забезпечити відповідність результатів командам. RR1 отримує дані зворотного зв’язку із замкнутим контуром від датчиків на кожному з шести шарнірів, які приводяться в рух кроковими двигунами через планетарні редуктори, надруковані на 3D.
Плата Arduino Due керує кроковими двигунами через плати драйверів і контролює кодери. Він передає дані з кодера на комп’ютер під назвою RB1: Real Box One і отримує у відповідь команди керування. Продемонстрований кінцевий ефектор — це стандартний затискач, а решта рукоятки — це комбінація 3D-друкованих деталей і екструзії алюмінію. Поточна версія RR1 має максимальний радіус дії 80 см і може піднімати близько 2 кг. Це вже вражає, але Суринек планує покращити його за допомогою майбутнього перегляду.
What's Your Reaction?