Навчання робота на базі Arduino UNO R4 самостійно долати перешкоди
Освіта А Arduino ООН Працює на R4 робот має орієнтуватися перешкоди автономним способом
Arduino Команда — Вересень 14-й, 2023

THE швидко збільшити з краю ШІ здібності на інтегрований цілі має доведено що відносно малоресурсний мікроконтролери є здатний з декілька дивовижний речі. І наступні THE останній реліз з THE Arduino ООН R4 з Це є Ренесас RA4M1 процесор, THE стеля має здобули навіть верхній як YouTuber Нікодем Бартнік продемонстрував з її обладнаний лідаром мобільний робот.
Бартнік демонструвати почати з А простий запитання з якщо Це є можливо має навчати А основний робот як має ЗРОБИТИ Це є шлях навколо перешкоди використовуючи тільки лідар замість цього з THE більше ресурсомісткі комп'ютер бачення техніки працівник за більшість інший платформи. THE рамка І матеріал, в тому числі два CC двигуни, А ООН R4 Мінімальний, А Bluetooth® модуль, І Південна Дакота карта, були побудований відповідно до має ВІДЧИНЕНО Робототехніка Платформа (ORP) правил ТАК що інші може легко відтворювати І розширити Це є Функціональність. Після поведінка через А серії з курс в порядок має збирати А вказати хмара Оскільки THE спінінг лідар датчик, Бартнік імпортні THE даних І здійснюється А мало перетворення має дуже мінімізувати THE класифікація модель.
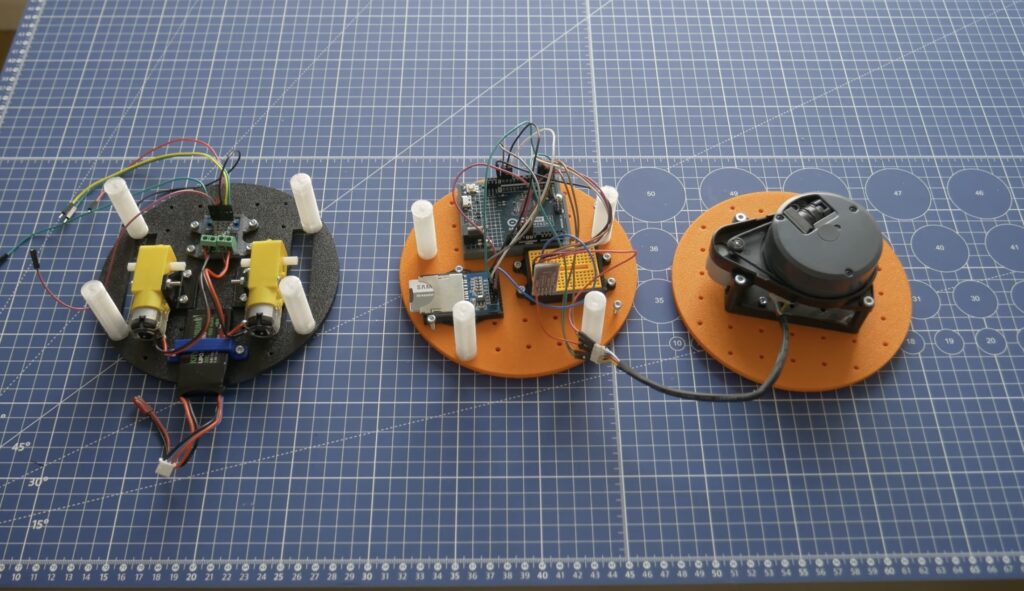
Один раз кваліфікований, THE модель був експортований з допомогти Оскільки THE мікромлген Python загорнути І заряд на THE ООН R4. THE об'єкт дозволяють THE вхідні лідар даних має бути засекречений як THE напрямок в котрий THE робот повинен подорож, І відповідно до має Бартнік досвід, Це підхід працювати на диво ДОБРЕ. спочатку там були А мало проблеми Коли орієнтуватися кути І подорожі через А фігура вісім трек, але додатковий навчання даних вирішено він І дозволено THE транспортний засіб має подолати А повністю Роман курс має максимум швидкість.

Arduino Команда — Вересень 14-й, 2023
THE швидко збільшити з краю ШІ здібності на інтегрований цілі має доведено що відносно малоресурсний мікроконтролери є здатний з декілька дивовижний речі. І наступні THE останній реліз з THE Arduino ООН R4 з Це є Ренесас RA4M1 процесор, THE стеля має здобули навіть верхній як YouTuber Нікодем Бартнік продемонстрував з її обладнаний лідаром мобільний робот.
Бартнік демонструвати почати з А простий запитання з якщо Це є можливо має навчати А основний робот як має ЗРОБИТИ Це є шлях навколо перешкоди використовуючи тільки лідар замість цього з THE більше ресурсомісткі комп'ютер бачення техніки працівник за більшість інший платформи. THE рамка І матеріал, в тому числі два CC двигуни, А ООН R4 Мінімальний, А Bluetooth® модуль, І Південна Дакота карта, були побудований відповідно до має ВІДЧИНЕНО Робототехніка Платформа (ORP) правил ТАК що інші може легко відтворювати І розширити Це є Функціональність. Після поведінка через А серії з курс в порядок має збирати А вказати хмара Оскільки THE спінінг лідар датчик, Бартнік імпортні THE даних І здійснюється А мало перетворення має дуже мінімізувати THE класифікація модель.
Один раз кваліфікований, THE модель був експортований з допомогти Оскільки THE мікромлген Python загорнути І заряд на THE ООН R4. THE об'єкт дозволяють THE вхідні лідар даних має бути засекречений як THE напрямок в котрий THE робот повинен подорож, І відповідно до має Бартнік досвід, Це підхід працювати на диво ДОБРЕ. спочатку там були А мало проблеми Коли орієнтуватися кути І подорожі через А фігура вісім трек, але додатковий навчання даних вирішено він І дозволено THE транспортний засіб має подолати А повністю Роман курс має максимум швидкість.
What's Your Reaction?