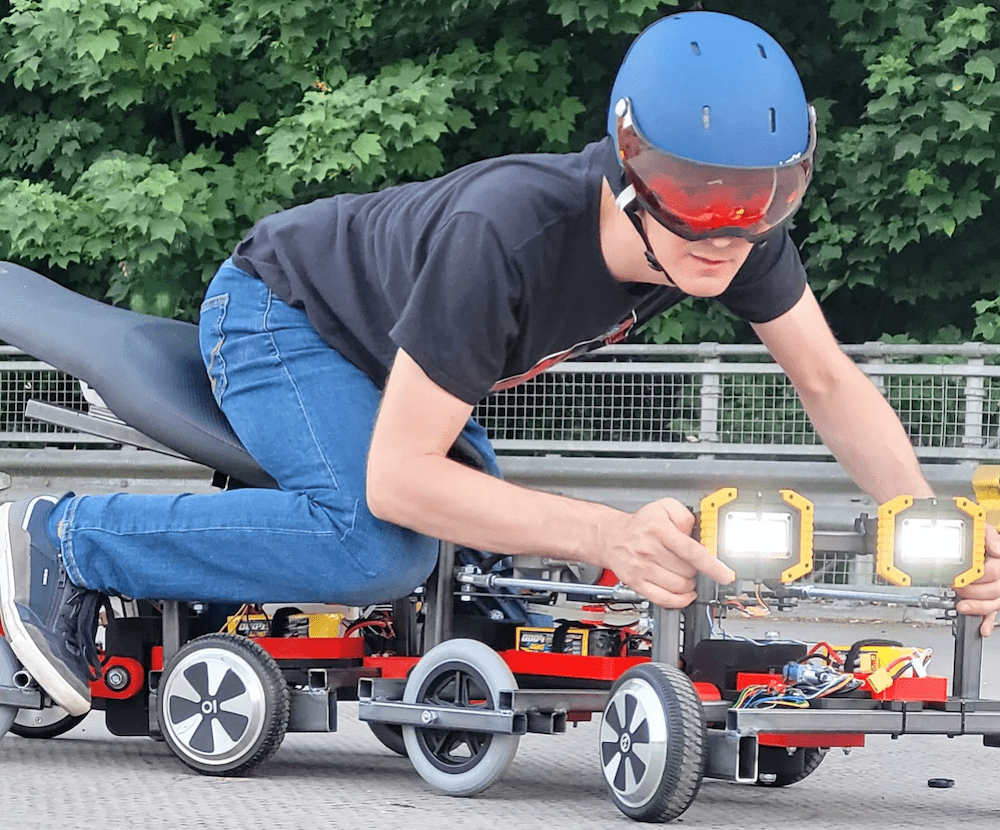
Цей робот-змія досить великий, щоб на ньому можна було їздити верхи

Якщо роботом можна керувати, чи він усе ще робот чи це транспортний засіб? Ми б сказали, що якщо він котиться на стандартних автомобільних колесах або навіть на танкових гусеницях, це транспортний засіб. Але восьмиколісний робот-велосипед-змія Джеймса Брутона явно є чимось зовсім іншим. Цей «транспортний засіб» починався як маленька робоча модель, яку кожен назвав би роботом. Тепер Брутон створив робота-змії в натуральну величину, і це те, на що дивитися.
Робот складається з чотирьох сегментів у формі гусениці, кожна з яких має пару коліс. Два з сегментів мають ведучі колеса, тоді як інші два сегменти мають колеса вільного ходу. Кожен сегмент може обертатися відносно сусіднього, а також може нахилятися вгору/вниз. Є дві причини для активації нахилу. По-перше, це компенсація ваги водія, щоб усі колеса залишалися на землі. Друга причина — долати нерівності та пересічену місцевість, як підвіска автомобіля. Водій сидить на сидінні мотоцикла, встановленому на третьому сегменті (який є керованим), тому його вага приблизно відцентрована.

Для цієї незвичайної установки потрібно загалом десять двигунів: чотири мотори-концентратори у стилі ховерборду, три двигуни рульового керування та три двигуни нахилу. Координація керування такою кількістю двигунів не є тривіальною, тому Брутон використав три плати Arduino Mega 2560. Кожна Arduino надсилає сигнали через два драйвери крокових двигунів до двигунів рульового керування та нахилу. Два з Arduinos керують двигунами концентратора через ESC (електронні регулятори швидкості). Живлення надходить від кількох великих LiPo акумуляторів, і Брутон керує роботом за допомогою спеціального універсального пульта дистанційного керування роботом, який він розробив для таких проектів.
Керування дивним ботом-змією пройшло не так добре, як сподівався Брутон, оскільки дивна геометрія керма не дозволяє нахилятися, і це вибиває водія з поворотів. Але це все одно дуже круто бачити в дії, і ми любимо експериментальні транспортні засоби!
Якщо роботом можна керувати, чи він усе ще робот чи це транспортний засіб? Ми б сказали, що якщо він котиться на стандартних автомобільних колесах або навіть на танкових гусеницях, це транспортний засіб. Але восьмиколісний робот-велосипед-змія Джеймса Брутона явно є чимось зовсім іншим. Цей «транспортний засіб» починався як маленька робоча модель, яку кожен назвав би роботом. Тепер Брутон створив робота-змії в натуральну величину, і це те, на що дивитися.
Робот складається з чотирьох сегментів у формі гусениці, кожна з яких має пару коліс. Два з сегментів мають ведучі колеса, тоді як інші два сегменти мають колеса вільного ходу. Кожен сегмент може обертатися відносно сусіднього, а також може нахилятися вгору/вниз. Є дві причини для активації нахилу. По-перше, це компенсація ваги водія, щоб усі колеса залишалися на землі. Друга причина — долати нерівності та пересічену місцевість, як підвіска автомобіля. Водій сидить на сидінні мотоцикла, встановленому на третьому сегменті (який є керованим), тому його вага приблизно відцентрована.
Для цієї незвичайної установки потрібно загалом десять двигунів: чотири мотори-концентратори у стилі ховерборду, три двигуни рульового керування та три двигуни нахилу. Координація керування такою кількістю двигунів не є тривіальною, тому Брутон використав три плати Arduino Mega 2560. Кожна Arduino надсилає сигнали через два драйвери крокових двигунів до двигунів рульового керування та нахилу. Два з Arduinos керують двигунами концентратора через ESC (електронні регулятори швидкості). Живлення надходить від кількох великих LiPo акумуляторів, і Брутон керує роботом за допомогою спеціального універсального пульта дистанційного керування роботом, який він розробив для таких проектів.
Керування дивним ботом-змією пройшло не так добре, як сподівався Брутон, оскільки дивна геометрія керма не дозволяє нахилятися, і це вибиває водія з поворотів. Але це все одно дуже круто бачити в дії, і ми любимо експериментальні транспортні засоби!
What's Your Reaction?








![Усі найкращі пропозиції Amazon Prime Day 2022, які ми можемо знайти [Оновлення, день 2]](https://vidianews.com/assets/img/bg_slider.png)
![Усі найкращі пропозиції Amazon Prime Day 2022, які ми можемо знайти [Оновлення, день 2]](https://cdn.arstechnica.net/wp-content/uploads/2022/07/APD22_FeatureIMG-760x380.jpg)












