This strange exoskeleton glove enables VR force feedback

We are currently witnessing something of a technological blitzkrieg as companies and engineers try to solve the problem of tactility in virtual reality (VR). Modern VR headsets provide fairly realistic visual and auditory immersion, but this immersion breaks down when users find themselves unable to physically interact with virtual objects. Developed by a team of researchers from National Chengchi University, ELAXO is an Arduino-controlled exoskeleton glove that enables complex force feedback for VR applications.
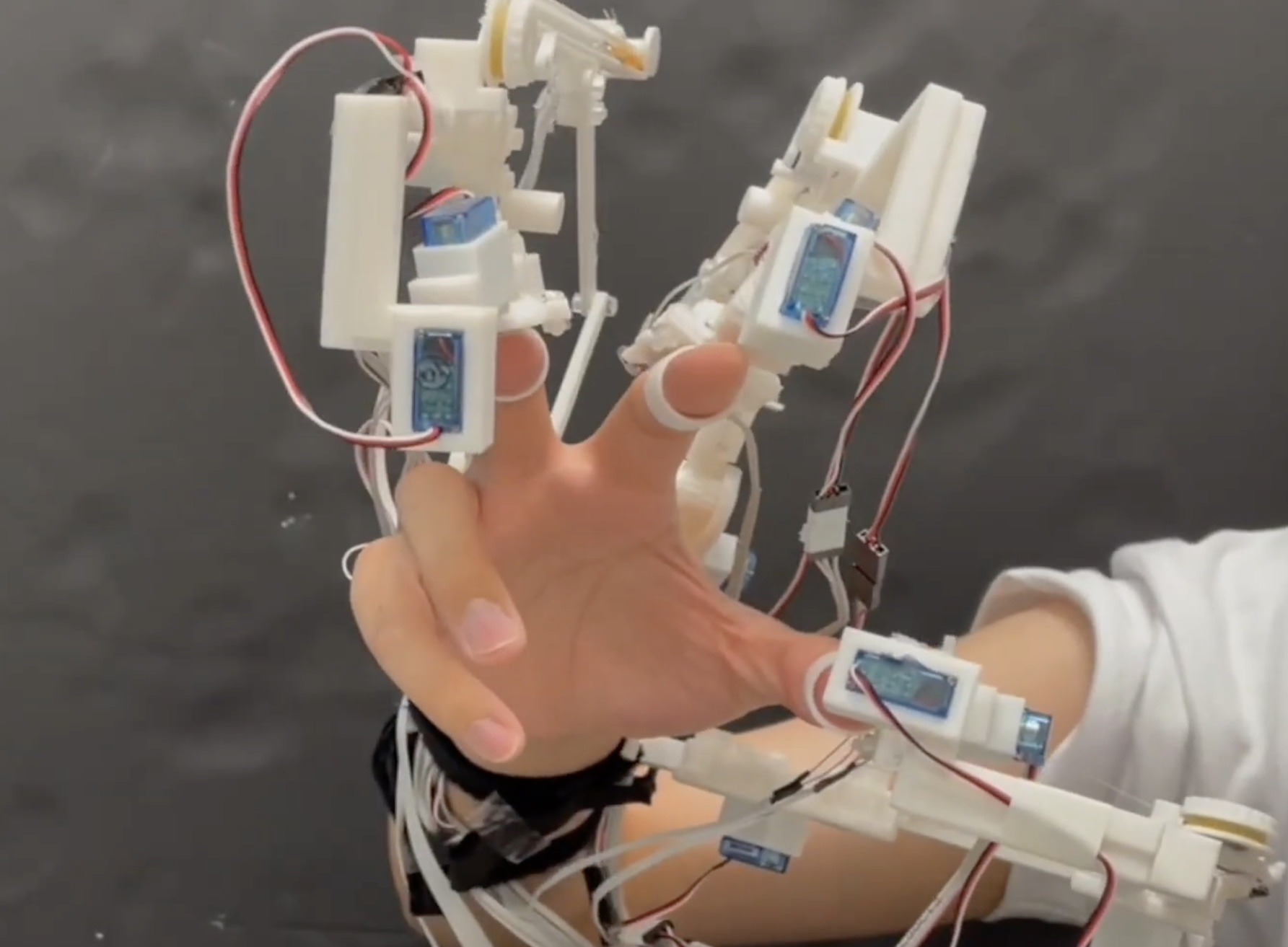
ELAXO looks unwieldy: it's like an exoskeleton glove made of 3D-printed spacers and gaskets. In the configuration demonstrated, ELAXO mounts to the user's wrist and has force feedback structures attached to their thumb and first two fingers. Each finger receives four servo motors, four small DC motors and a larger DC motor. These motors attach to joints to create physical resistance to movement on demand.
For two fingers and one thumb, ELAXO requires a total of 12 servos, 12 small DC motors and three large DC motors. Each finger also needs an infrared (IR) sensor, for a total of three. Also, large DC motors contain encoders that use two wires each. Controlling these requires a lot of I/O pins, which is why the ELAXO team chose an Arduino Mega board for their prototype. It controls the motors via eight dual TB6612FNG drivers.
The Arduino powers the motors based on what's happening in the VR world. For example, if a user tries to touch a stationary object, the motors in that finger can get full power to keep the joints from bending and to provide a solid resistance feel. Other actions, such as turning a knob, cause less resistance. By gaining granular control over the resistance of each joint, ELAXO can produce compelling force feedback.
We are currently witnessing something of a technological blitzkrieg as companies and engineers try to solve the problem of tactility in virtual reality (VR). Modern VR headsets provide fairly realistic visual and auditory immersion, but this immersion breaks down when users find themselves unable to physically interact with virtual objects. Developed by a team of researchers from National Chengchi University, ELAXO is an Arduino-controlled exoskeleton glove that enables complex force feedback for VR applications.
ELAXO looks unwieldy: it's like an exoskeleton glove made of 3D-printed spacers and gaskets. In the configuration demonstrated, ELAXO mounts to the user's wrist and has force feedback structures attached to their thumb and first two fingers. Each finger receives four servo motors, four small DC motors and a larger DC motor. These motors attach to joints to create physical resistance to movement on demand.
For two fingers and one thumb, ELAXO requires a total of 12 servos, 12 small DC motors and three large DC motors. Each finger also needs an infrared (IR) sensor, for a total of three. Also, large DC motors contain encoders that use two wires each. Controlling these requires a lot of I/O pins, which is why the ELAXO team chose an Arduino Mega board for their prototype. It controls the motors via eight dual TB6612FNG drivers.
The Arduino powers the motors based on what's happening in the VR world. For example, if a user tries to touch a stationary object, the motors in that finger can get full power to keep the joints from bending and to provide a solid resistance feel. Other actions, such as turning a knob, cause less resistance. By gaining granular control over the resistance of each joint, ELAXO can produce compelling force feedback.
What's Your Reaction?