Чи можуть штативні роботи ходити?

Створювати роботів, які ходять, важко, оскільки їм потрібно багато ніг або певна здатність утримувати рівновагу під час ходи. Є причина, чому роботи, створені такими компаніями, як Boston Dynamics, такі чудові. Але багато аматорів створили двоногих і чотириногих роботів, в основному ігноруючи триногих роботів. Щоб дізнатися, чи вони практичні, Джеймс Брутон створив прототип триногого робота.
Порівняно з двоногим роботом робот-штатив більш стабільний у нерухомому стані. Але двоногий робот більш стійкий при ходьбі. Це тому, що він може тримати свій центр ваги майже прямо над ногою, яка торкається землі. З іншого боку, робот, що рухається на ногах, повинен намагатися збалансувати себе на двох ногах, пересуваючи третю, тоді як центр ваги знаходиться десь над серединою трикутника, утвореного трьома ногами. Це ускладнює виконання ходьби.
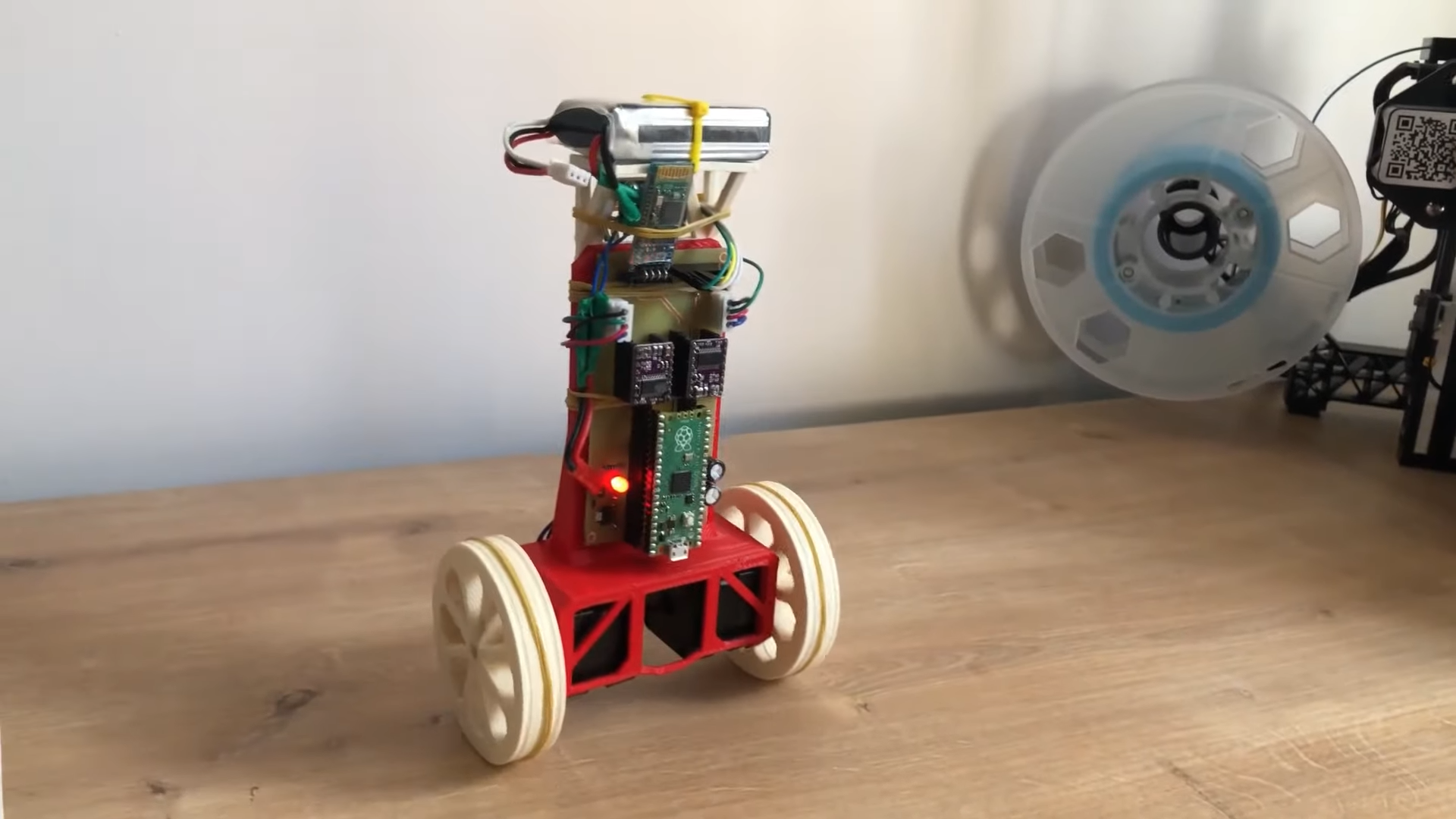
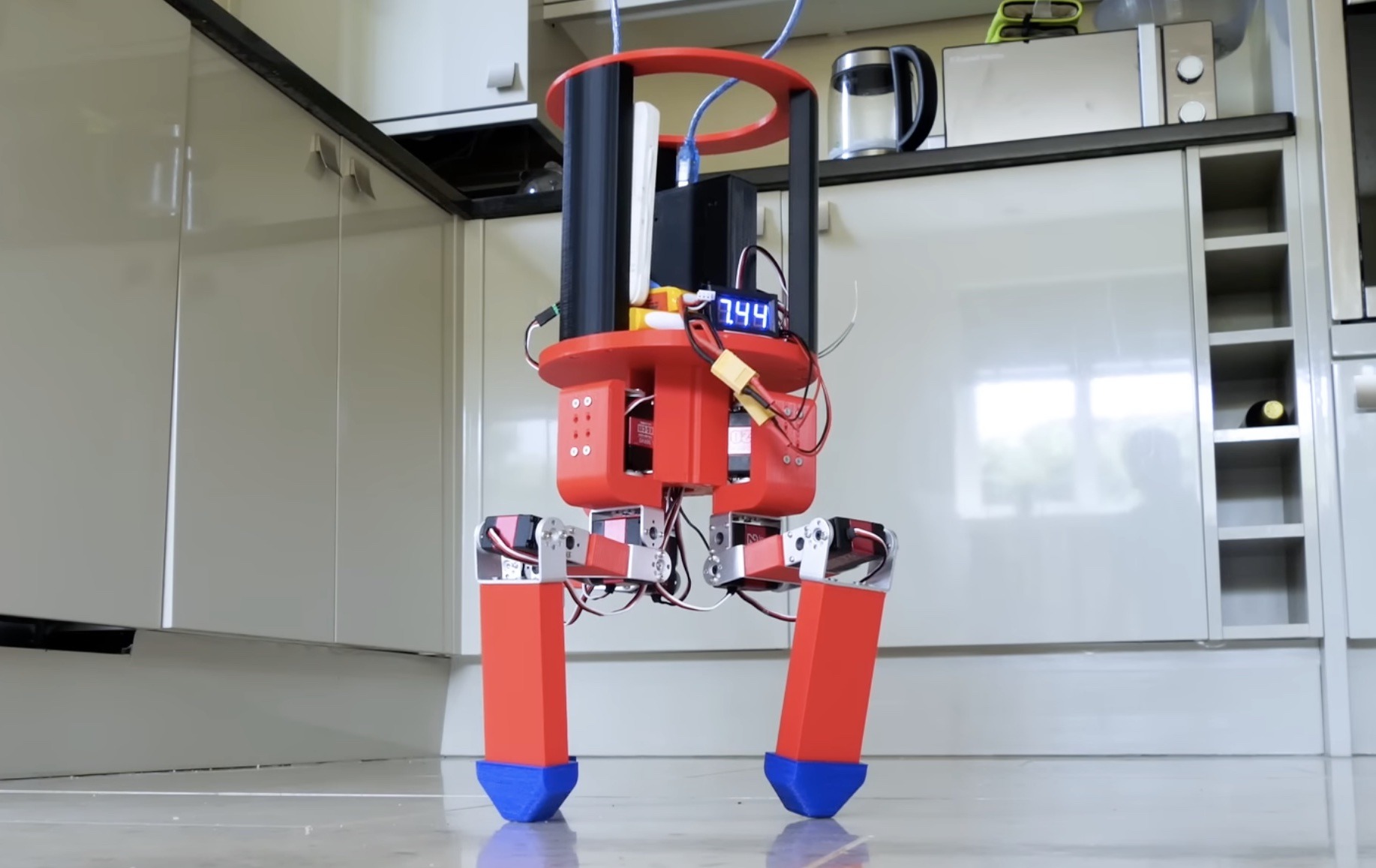
Брутон створив цей прототип, використовуючи надрукований на 3D-вимірі корпус, ніжки з сервоприводом і Arduino Mega 2560 для керування. Три ніжки розташовані з радіальною симетрією, і кожна нога має три суглоби. Брутон спробував надати роботу ходу, за якої він на мить намагається втримати рівновагу на двох ногах, а третю піднімає й розгойдує.
Але це було дуже неефективно та незграбно. Брутон вважає, що міг би отримати кращі результати, оснастивши робота IMU. Це дало б йому відчуття рівноваги, що могло б допомогти йому залишатися стійким на двох ногах під час ходи. З противагою це може мати велике значення. Але наразі Брутон призупиняє цей експеримент.
Створювати роботів, які ходять, важко, оскільки їм потрібно багато ніг або певна здатність утримувати рівновагу під час ходи. Є причина, чому роботи, створені такими компаніями, як Boston Dynamics, такі чудові. Але багато аматорів створили двоногих і чотириногих роботів, в основному ігноруючи триногих роботів. Щоб дізнатися, чи вони практичні, Джеймс Брутон створив прототип триногого робота.
Порівняно з двоногим роботом робот-штатив більш стабільний у нерухомому стані. Але двоногий робот більш стійкий при ходьбі. Це тому, що він може тримати свій центр ваги майже прямо над ногою, яка торкається землі. З іншого боку, робот, що рухається на ногах, повинен намагатися збалансувати себе на двох ногах, пересуваючи третю, тоді як центр ваги знаходиться десь над серединою трикутника, утвореного трьома ногами. Це ускладнює виконання ходьби.
Брутон створив цей прототип, використовуючи надрукований на 3D-вимірі корпус, ніжки з сервоприводом і Arduino Mega 2560 для керування. Три ніжки розташовані з радіальною симетрією, і кожна нога має три суглоби. Брутон спробував надати роботу ходу, за якої він на мить намагається втримати рівновагу на двох ногах, а третю піднімає й розгойдує.
Але це було дуже неефективно та незграбно. Брутон вважає, що міг би отримати кращі результати, оснастивши робота IMU. Це дало б йому відчуття рівноваги, що могло б допомогти йому залишатися стійким на двох ногах під час ходи. З противагою це може мати велике значення. Але наразі Брутон призупиняє цей експеримент.
What's Your Reaction?