Перетворіть дрон на великий пропелер, щоб підвищити ефективність зависання
Безпілотники з багатьма гвинтами значно популярніші за звичайні вертольоти з багатьох причин, не враховуючи ефективності. Використовуючи аеродинамічні ефекти, що стоять за цим, [Ніколас Рем] зміг значно підвищити ефективність свого експериментального трикоптера, перетворивши його на один великий обертовий гвинт.
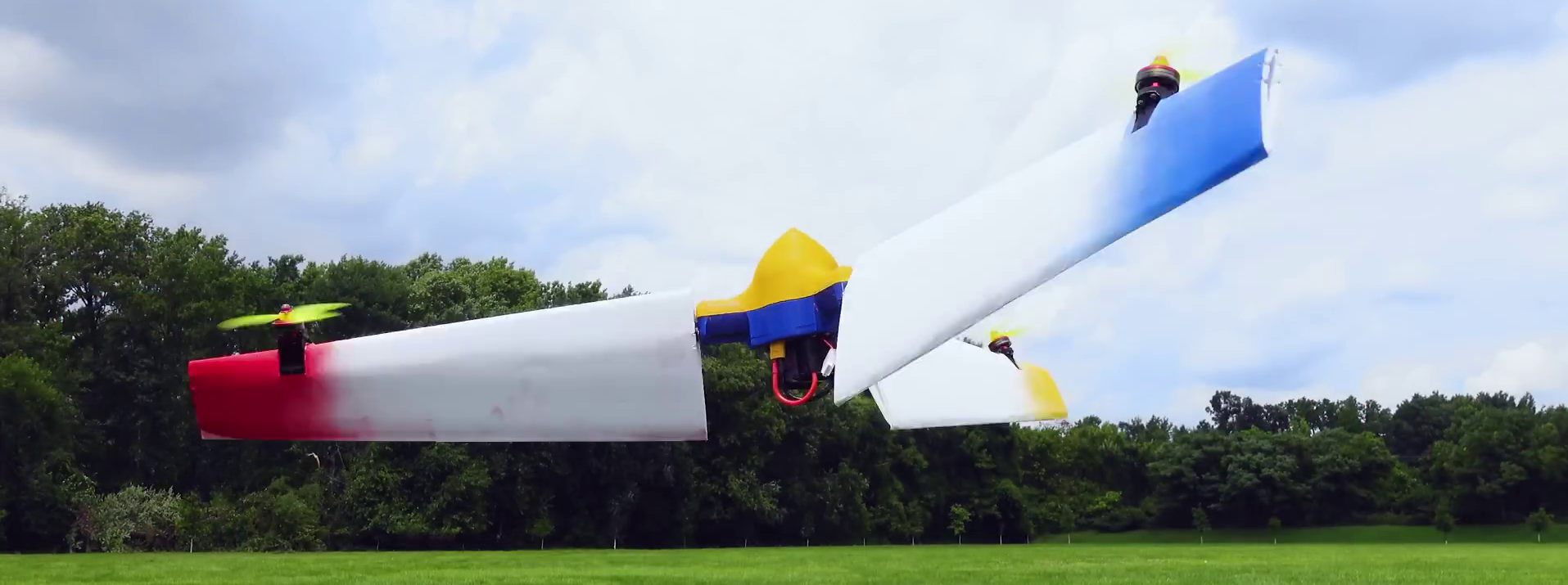
Оскільки аеродинамічний опір пропорційний швидкості, малий гвинт на високих обертах потребує більше енергії, щоб створити таку ж тягу, як великий гвинт на низьких обертах. Маючи це на увазі, [Ніколас] створив трикоптер, який може обертати всі три довгі руки разом за допомогою одного сервоприводу, надаючи йому дуже агресивне керування поворотом. Прикріпивши крило до кожної з важіль, він перетворюється на великий пропелер із змінним кроком, що приводиться в дію найсучаснішими двигунами.
Для вимірювання ефективності корабля додано невеликий лідарний датчик, який дозволяє точно контролювати висоту PID. Утримуючи безпілотник на постійній висоті в декількох метрах над землею, [Ніколас] виміряв енергоспоживання двигунів під час зависання, а потім дозволив дрону обертатися навколо своєї осі повороту майже до 5 об/хв.
При швидкості обертання 4 об/хв енергоспоживання двигунів було зменшено більш ніж на 60%. Навіть порівняно з безпілотником без додаткової ваги крил, він все одно споживає на 50% менше енергії для підтримки висоти.
Оскільки [Микола] ще не реалізував контроль горизонтального положення під час обертання, тривалість кожного випробування обмежувалась дрейфом вітру. Він планує вирішити цю проблему та випробувати дрон у горизонтальному польоті, де додані аеродинамічні профілі також підвищать ефективність.
Ми представили деякі з літальних апаратів [Ніколаса] тут, на Hackaday, зокрема пінопластовий F-35 VTOL і циклокоптер. Більшість його літаків використовують систему стабілізації польоту dRehmFlight з відкритим кодом, створену спеціально для злому.
Безпілотники з багатьма гвинтами значно популярніші за звичайні вертольоти з багатьох причин, не враховуючи ефективності. Використовуючи аеродинамічні ефекти, що стоять за цим, [Ніколас Рем] зміг значно підвищити ефективність свого експериментального трикоптера, перетворивши його на один великий обертовий гвинт.
Оскільки аеродинамічний опір пропорційний швидкості, малий гвинт на високих обертах потребує більше енергії, щоб створити таку ж тягу, як великий гвинт на низьких обертах. Маючи це на увазі, [Ніколас] створив трикоптер, який може обертати всі три довгі руки разом за допомогою одного сервоприводу, надаючи йому дуже агресивне керування поворотом. Прикріпивши крило до кожної з важіль, він перетворюється на великий пропелер із змінним кроком, що приводиться в дію найсучаснішими двигунами.
Для вимірювання ефективності корабля додано невеликий лідарний датчик, який дозволяє точно контролювати висоту PID. Утримуючи безпілотник на постійній висоті в декількох метрах над землею, [Ніколас] виміряв енергоспоживання двигунів під час зависання, а потім дозволив дрону обертатися навколо своєї осі повороту майже до 5 об/хв.
При швидкості обертання 4 об/хв енергоспоживання двигунів було зменшено більш ніж на 60%. Навіть порівняно з безпілотником без додаткової ваги крил, він все одно споживає на 50% менше енергії для підтримки висоти.
Оскільки [Микола] ще не реалізував контроль горизонтального положення під час обертання, тривалість кожного випробування обмежувалась дрейфом вітру. Він планує вирішити цю проблему та випробувати дрон у горизонтальному польоті, де додані аеродинамічні профілі також підвищать ефективність.
Ми представили деякі з літальних апаратів [Ніколаса] тут, на Hackaday, зокрема пінопластовий F-35 VTOL і циклокоптер. Більшість його літаків використовують систему стабілізації польоту dRehmFlight з відкритим кодом, створену спеціально для злому.
What's Your Reaction?