This project lets you experience life with a cybernetic tail
Modern humans have given up their tails in favor of straight walking, and this fact left maker Pengfei Zhang wondering what it would be like to have such an appendage. From this idea, she created with Sarvenaz Sardari and Xi Peng the Cyber Tail, which integrates on-board electronics into a small device that moves with its wearer.
The Cyber Tail's design revolves around a central base that houses a set of four servos. In order to move the tail in different directions, each servo can pull or release a single string, causing the tail itself to bend, similar to how a finger works, except in four possible directions. The Arduino Uno controlling these movements relies on an external infrared sensor in a pair of glasses that detects whenever the user blinks.
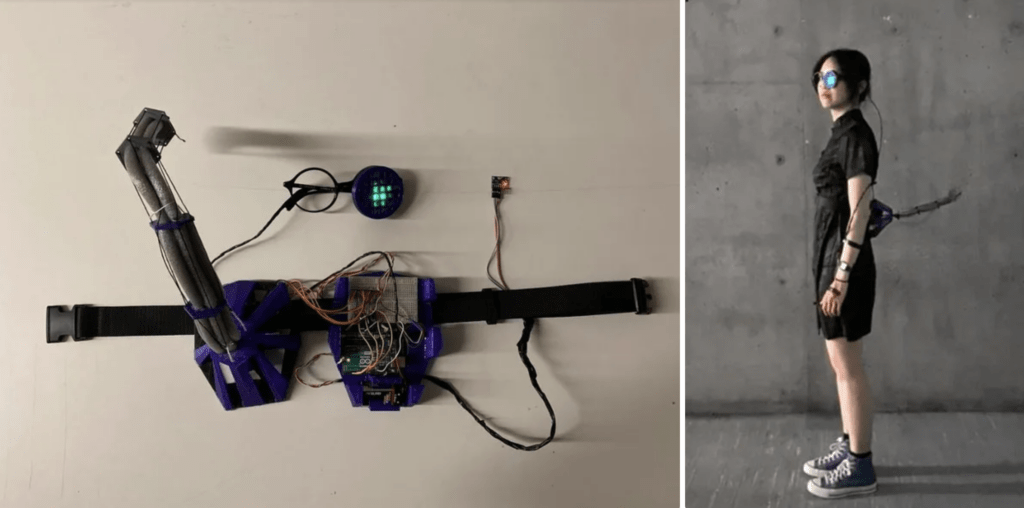
If a blink is recognized, two of the servos move in opposite directions to bend the tail in a particular way, and if a blink is not present, then they move in the other direction. Finally, the MPU-6050's accelerometer is read and used to calculate the angles of the other two servos which also bend the tail. Together, these three stages allow the Cyber Tail to move in a myriad of different ways.
About 25 million years ago, our ancestors lost their tails during evolution, to better adapt to the environment. As we live in the digital age, our bodies evolve with the cyberworld. What would a cybernetic tail bring to our daily lives?
For more on this project, be sure to read the team's write-up here on Instructables or watch their video below!


Modern humans have given up their tails in favor of straight walking, and this fact left maker Pengfei Zhang wondering what it would be like to have such an appendage. From this idea, she created with Sarvenaz Sardari and Xi Peng the Cyber Tail, which integrates on-board electronics into a small device that moves with its wearer.
The Cyber Tail's design revolves around a central base that houses a set of four servos. In order to move the tail in different directions, each servo can pull or release a single string, causing the tail itself to bend, similar to how a finger works, except in four possible directions. The Arduino Uno controlling these movements relies on an external infrared sensor in a pair of glasses that detects whenever the user blinks.
If a blink is recognized, two of the servos move in opposite directions to bend the tail in a particular way, and if a blink is not present, then they move in the other direction. Finally, the MPU-6050's accelerometer is read and used to calculate the angles of the other two servos which also bend the tail. Together, these three stages allow the Cyber Tail to move in a myriad of different ways.
About 25 million years ago, our ancestors lost their tails during evolution, to better adapt to the environment. As we live in the digital age, our bodies evolve with the cyberworld. What would a cybernetic tail bring to our daily lives?
For more on this project, be sure to read the team's write-up here on Instructables or watch their video below!
What's Your Reaction?






















