The real Robot One is… real
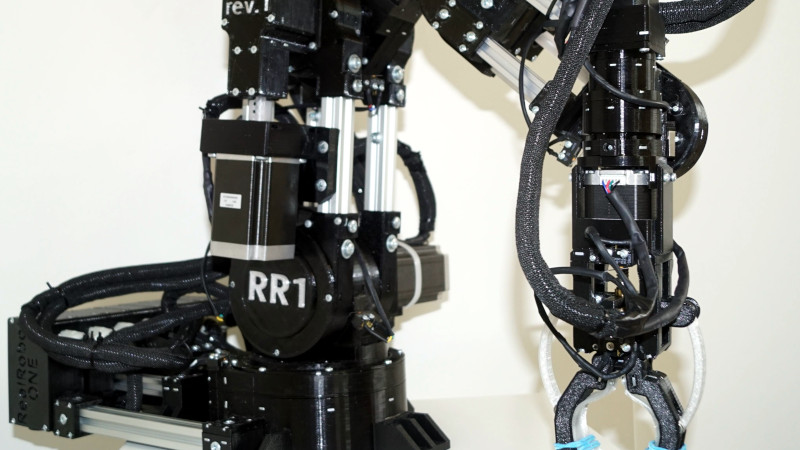
Most of the robot arms we see are cool, but nothing more than toys. Usually they use RC servos to perform movement, which is great for basic movement, but if you want something more industrial and capable, check out [Pavel's] RR1 - Real Robot One. The beefy arm has six degrees of freedom powered by custom stepper motors and planetary gearheads. Each joint has an encoder for precise position feedback. The first prototype is already working, as you can see in the video below. The second version is coming soon.
When you see the thing in action, you can immediately tell it's not a toy. There are four NEMA23 stepper motors and three smaller NEMA17 motors. While there are 3D printed parts, you can also see a lot of metal in the build. You can see a video of the arm lifting a 1kg barbell and taking a refreshing soft drink.
From [Pavel's] comments on the second revision, it looks like he's trying to minimize negative feedback, which must be a bit of a problem with the first version. One thing we didn't see is that there is no design file for any part of the device, so for now it will just have to be used as inspiration. But since the project is up on Hackaday.io, hopefully we can take a look at the design for the second revision eventually.
In the meantime, if you want to build something more modest, maybe raid a CD player. Although servo arms have a bad reputation, you can actually make them great with a little work.
Most of the robot arms we see are cool, but nothing more than toys. Usually they use RC servos to perform movement, which is great for basic movement, but if you want something more industrial and capable, check out [Pavel's] RR1 - Real Robot One. The beefy arm has six degrees of freedom powered by custom stepper motors and planetary gearheads. Each joint has an encoder for precise position feedback. The first prototype is already working, as you can see in the video below. The second version is coming soon.
When you see the thing in action, you can immediately tell it's not a toy. There are four NEMA23 stepper motors and three smaller NEMA17 motors. While there are 3D printed parts, you can also see a lot of metal in the build. You can see a video of the arm lifting a 1kg barbell and taking a refreshing soft drink.
From [Pavel's] comments on the second revision, it looks like he's trying to minimize negative feedback, which must be a bit of a problem with the first version. One thing we didn't see is that there is no design file for any part of the device, so for now it will just have to be used as inspiration. But since the project is up on Hackaday.io, hopefully we can take a look at the design for the second revision eventually.
In the meantime, if you want to build something more modest, maybe raid a CD player. Although servo arms have a bad reputation, you can actually make them great with a little work.
What's Your Reaction?