An experimental low-cost ultrasonic drone positioning system

Drone shows have become a big trend over the past few years, with some shows featuring thousands of individual drones. These shows are extremely expensive, as drones can easily cost a few thousand dollars each. A big part of the reason for their high cost is their on-board positioning systems, which must be accurate to within centimeters - far better than standard GPS can achieve. Looking for a more affordable option, James Bruton developed this experimental ultrasonic drone positioning system.
Like most positioning systems, this relies on triangulation through time-of-flight measurements. Triangulation allows you to find the position, on a 2D plane, of point A by measuring its distance from point B and point C and knowing in advance the distance between point B and point C. This is of a triangle and you know the length of each side (the distance between the points), so you can calculate the position of point A. Time of flight is the time it takes for a signal to travel between two points . When you know the speed of signal travel (which is usually statistical or close enough), you can calculate the distance by simply measuring the time it takes for the signal to leave point A and reach point B (or vice-versa). /p>
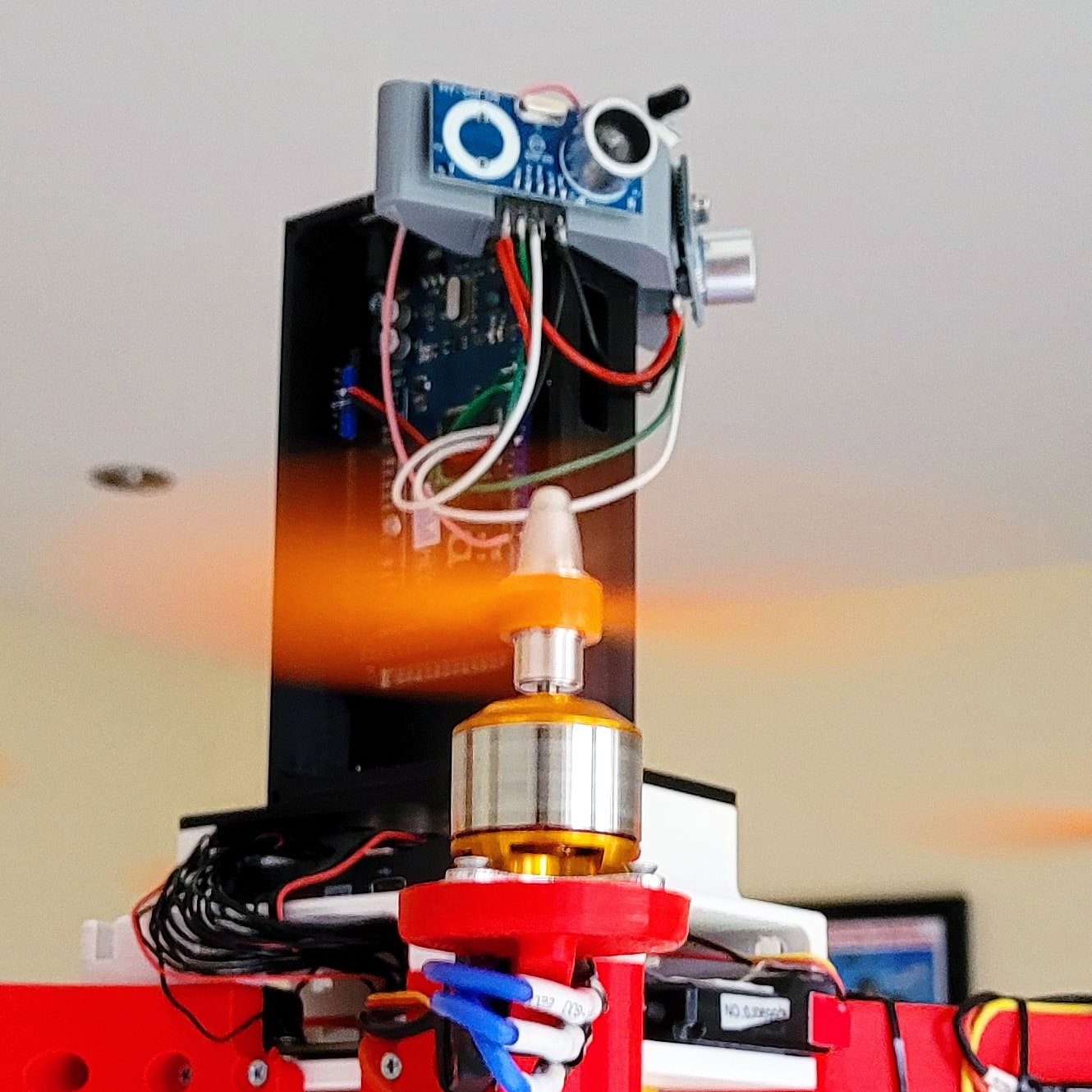
Bruton's design takes advantage of these principles with simple and inexpensive ultrasonic sensors. Normally these measure the time it takes to send a signal and receive the echo. But in this case, Bruton has separated the two tasks so that the system does not require a reflective surface. An ultrasonic sensor on a central hub emits a signal, and another ultrasonic sensor on the drone receives it. An array of infrared LEDs helps synchronize the two for precise timing. Arduino Mega 2560 boards on both sides (hub side and drone side) control the ultrasonic sensors.
With two hubs (Point B and Point C), the drone (Point A) can use ultrasonic distance measurements to triangulate its own position in real time. It works in 2D, but a third hub would allow 3D positioning. It worked well in initial testing, but was susceptible to interference from the drone's motors and rotors. Bruton plans to try another idea soon, but this ultrasonic positioning system would work well for other types of vehicles operating in a relatively small area.
Drone shows have become a big trend over the past few years, with some shows featuring thousands of individual drones. These shows are extremely expensive, as drones can easily cost a few thousand dollars each. A big part of the reason for their high cost is their on-board positioning systems, which must be accurate to within centimeters - far better than standard GPS can achieve. Looking for a more affordable option, James Bruton developed this experimental ultrasonic drone positioning system.
Like most positioning systems, this relies on triangulation through time-of-flight measurements. Triangulation allows you to find the position, on a 2D plane, of point A by measuring its distance from point B and point C and knowing in advance the distance between point B and point C. This is of a triangle and you know the length of each side (the distance between the points), so you can calculate the position of point A. Time of flight is the time it takes for a signal to travel between two points . When you know the speed of signal travel (which is usually statistical or close enough), you can calculate the distance by simply measuring the time it takes for the signal to leave point A and reach point B (or vice-versa). /p>
Bruton's design takes advantage of these principles with simple and inexpensive ultrasonic sensors. Normally these measure the time it takes to send a signal and receive the echo. But in this case, Bruton has separated the two tasks so that the system does not require a reflective surface. An ultrasonic sensor on a central hub emits a signal, and another ultrasonic sensor on the drone receives it. An array of infrared LEDs helps synchronize the two for precise timing. Arduino Mega 2560 boards on both sides (hub side and drone side) control the ultrasonic sensors.
With two hubs (Point B and Point C), the drone (Point A) can use ultrasonic distance measurements to triangulate its own position in real time. It works in 2D, but a third hub would allow 3D positioning. It worked well in initial testing, but was susceptible to interference from the drone's motors and rotors. Bruton plans to try another idea soon, but this ultrasonic positioning system would work well for other types of vehicles operating in a relatively small area.
What's Your Reaction?