Teaching an Arduino UNO R4-powered robot to navigate obstacles autonomously
Education A Arduino UN Powered by R4 robot has navigate obstacles in an autonomous way
Arduino Team — September the 14th, 2023

THE fast increase of edge AI abilities on integrated targets has proven that relatively low-resource microcontrollers are able of a few amazing things. And following THE recent release of THE Arduino UN R4 with It is Renesas RA4M1 processor, THE ceiling has got even upper as a YouTuber Nikodem Bartnik demonstrated with her equipped with lidar mobile robot.
Bartnik project begin with A simple question of if It is possible has teach A basic robot how has TO DO It is path around obstacles using only lidar instead of THE more resource-intensive computer vision techniques employee by most other platforms. THE frame And material, including two CC engines, A UN R4 Minimal, A Bluetooth® module, And South Dakota map, were built according to has Open Robotics Platform (ORP) rules SO that others can easily reproduce And extend It is Functionality. After conduct through A series of course In order has collect A indicate cloud Since THE spinning lidar sensor, Bartnik imported THE data And carried out A little transformations has very minimize THE classification model.
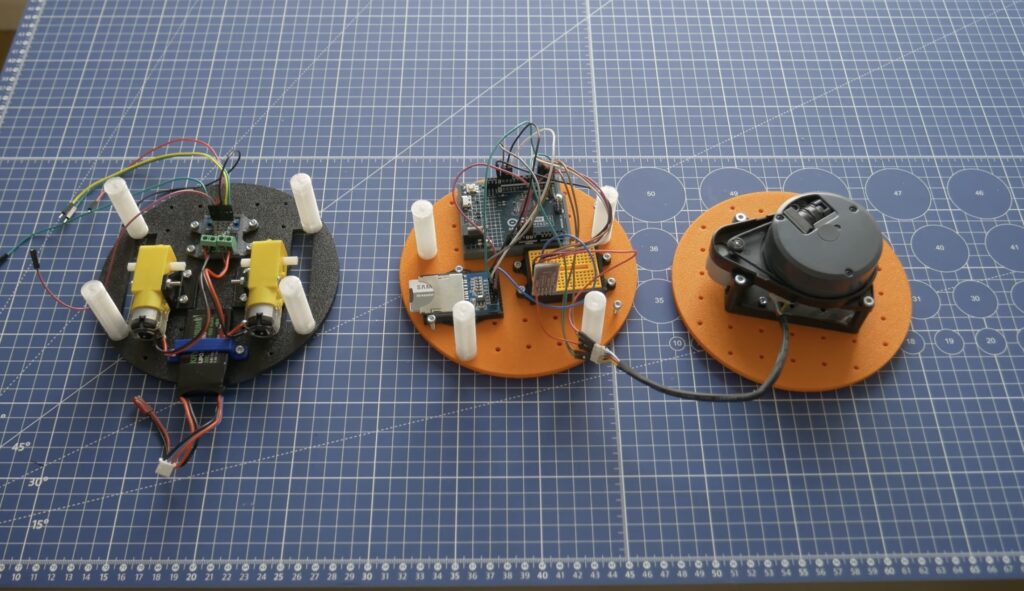
Once qualified, THE model was exported with help Since THE micromlgen Python wrap And charge on THE UN R4. THE facility allow THE incoming lidar data has be classified as THE direction In which THE robot should journey, And according to has Bartnik experiences, This approach work surprisingly GOOD. Initially, there were A little problems When navigate corners And traveling through A figure eight track, but additional training data resolved he And allowed THE vehicle has overcome A completely novel course has maximum speed.

Arduino Team — September the 14th, 2023
THE fast increase of edge AI abilities on integrated targets has proven that relatively low-resource microcontrollers are able of a few amazing things. And following THE recent release of THE Arduino UN R4 with It is Renesas RA4M1 processor, THE ceiling has got even upper as a YouTuber Nikodem Bartnik demonstrated with her equipped with lidar mobile robot.
Bartnik project begin with A simple question of if It is possible has teach A basic robot how has TO DO It is path around obstacles using only lidar instead of THE more resource-intensive computer vision techniques employee by most other platforms. THE frame And material, including two CC engines, A UN R4 Minimal, A Bluetooth® module, And South Dakota map, were built according to has Open Robotics Platform (ORP) rules SO that others can easily reproduce And extend It is Functionality. After conduct through A series of course In order has collect A indicate cloud Since THE spinning lidar sensor, Bartnik imported THE data And carried out A little transformations has very minimize THE classification model.
Once qualified, THE model was exported with help Since THE micromlgen Python wrap And charge on THE UN R4. THE facility allow THE incoming lidar data has be classified as THE direction In which THE robot should journey, And according to has Bartnik experiences, This approach work surprisingly GOOD. Initially, there were A little problems When navigate corners And traveling through A figure eight track, but additional training data resolved he And allowed THE vehicle has overcome A completely novel course has maximum speed.
What's Your Reaction?






















