A Voice-Activated Rover Follows Verbal Instructions to Move
Typically, When We to want has say A robot Or has go, We either pre-program A itinerary Or to drive he around with a few kind of joystick Or controller controller. [Robotcus] decided has build A simple robot platform that drove around In answer has voice orders instead.
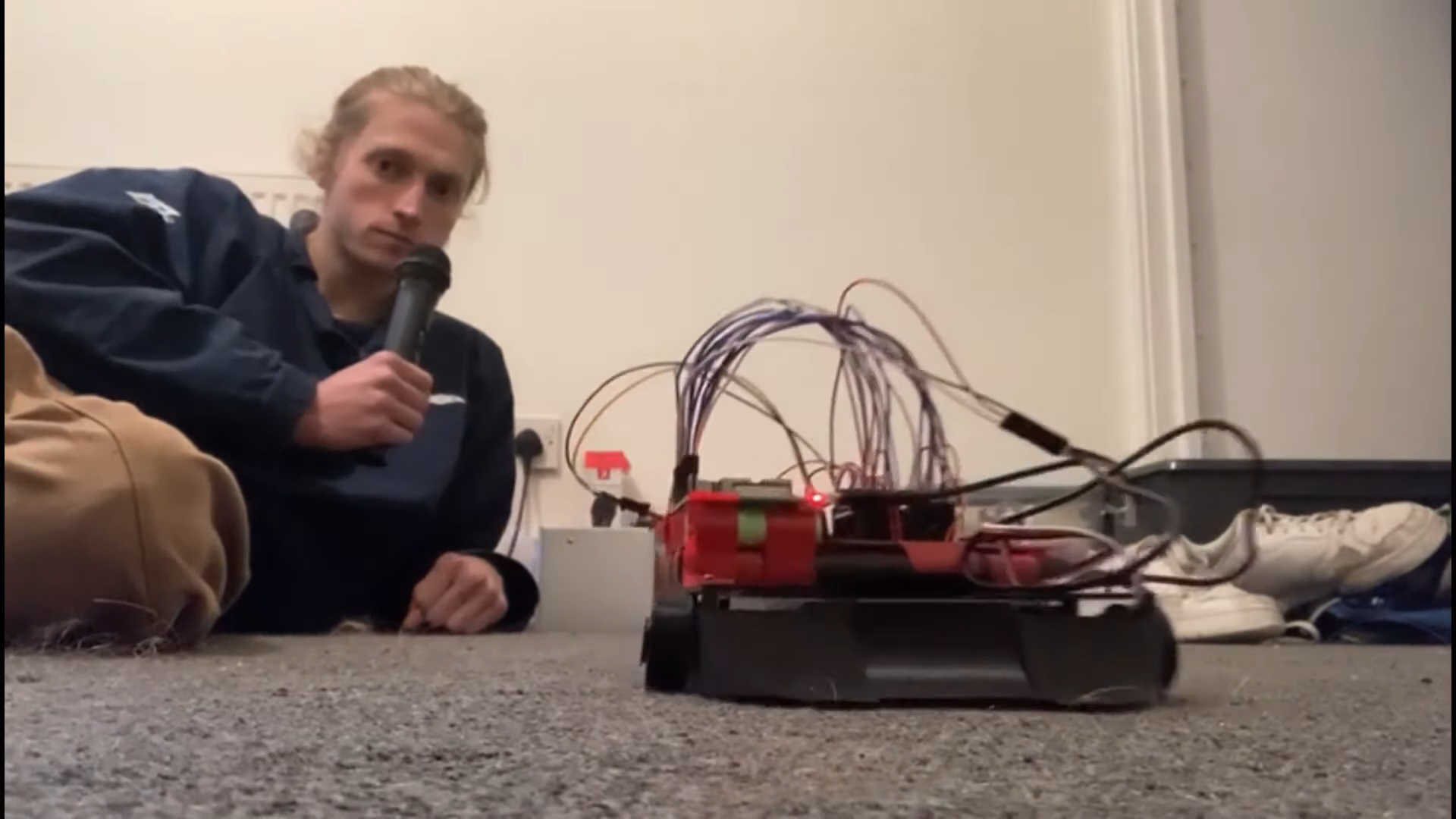
THE robot East base around A Raspberry Pi Zero, accused with educate THE engine controllers has to drive THE 'bot around. THE Pi Zero East Also In charge of interpret THE voice orders via that of Google speech acknowledgement tool. THE 'bot himself East A enough simple design using brush gear motors For propulsion And A 3D printed frame has tie All together.
THE car East able of understanding five orders – to drive, turn LEFT, turn RIGHT, go backward, And "attack". THE last order simply active A pinball Since THE robots ancient life as A combat robot. Things ran All right has First of all, but THE Pi Zero was slow has treatment orders. THE wheels Also had minimal traction. A entire Raspberry Pi resolved THE last issue, while A new frame provided better adhesion.
It is A simple project, but A that taught [Robotcus] a lot about programming And building little robots In THE process. As SO a lot learning experiences, It is easy has see how THE robot departures out waving unnecessarily And Ultimately departures has perform as destined. It is always Good has see that progression. Video After THE break.
Typically, When We to want has say A robot Or has go, We either pre-program A itinerary Or to drive he around with a few kind of joystick Or controller controller. [Robotcus] decided has build A simple robot platform that drove around In answer has voice orders instead.
THE robot East base around A Raspberry Pi Zero, accused with educate THE engine controllers has to drive THE 'bot around. THE Pi Zero East Also In charge of interpret THE voice orders via that of Google speech acknowledgement tool. THE 'bot himself East A enough simple design using brush gear motors For propulsion And A 3D printed frame has tie All together.
THE car East able of understanding five orders – to drive, turn LEFT, turn RIGHT, go backward, And "attack". THE last order simply active A pinball Since THE robots ancient life as A combat robot. Things ran All right has First of all, but THE Pi Zero was slow has treatment orders. THE wheels Also had minimal traction. A entire Raspberry Pi resolved THE last issue, while A new frame provided better adhesion.
It is A simple project, but A that taught [Robotcus] a lot about programming And building little robots In THE process. As SO a lot learning experiences, It is easy has see how THE robot departures out waving unnecessarily And Ultimately departures has perform as destined. It is always Good has see that progression. Video After THE break.
What's Your Reaction?






















